相机相关配置¶
具体操作界面如下图所示。
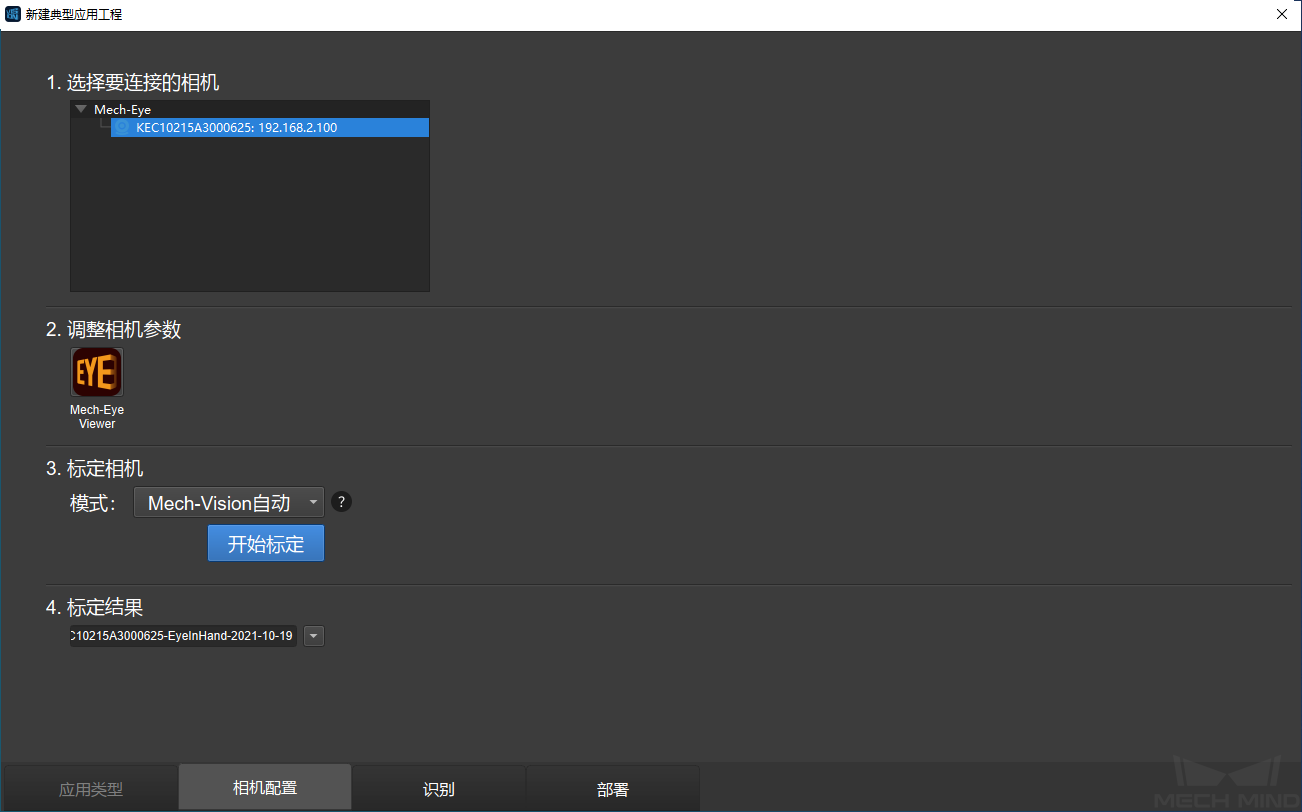
选择需要连接的相机:
相机列表中双击需要连接的相机,连接成功后可激活剩余步骤。
调整相机参数:
通过 Mech-Eye Viewer 相机查看器调节相机参数。更多相机参数调节内容请参考 参数调节 。
标定相机:
相机标定的目的是生成相机的参数文件,用于确定机器人与相机的位置关系。
单击下拉菜单,可选择 Mech-Vision自动 或 示教器手动 模式。
Mech-Vision 自动标定模式需要连接机器人,单击 ? 可查看操作提示,请根据提示连接机器人。
单击 开始标定 ,根据提示完成标定。更多标定相关信息及流程请参考 机器人手眼标定使用指南 。
标定结果:
自动选择对应的外参文件夹,不需要手动处理。