KUKA 마스터 컨트롤 프로그램 설명¶
프로그램 모듈 설명¶
.src 프로그램 파일
.dat 데이터 파일
mm_server: Robserver 데이터를 수신하고 로봇 포즈, 신호와 상태 데이터를 전송하는 백그라운드 프로그램
motion_control:로봇 이동을 컨트롤하는 포그라운드 프로그램
mainmodule:메인 프로그램
mm_status.xml 및 mm_motion.xml:통신 구성 파일
신호 설명¶
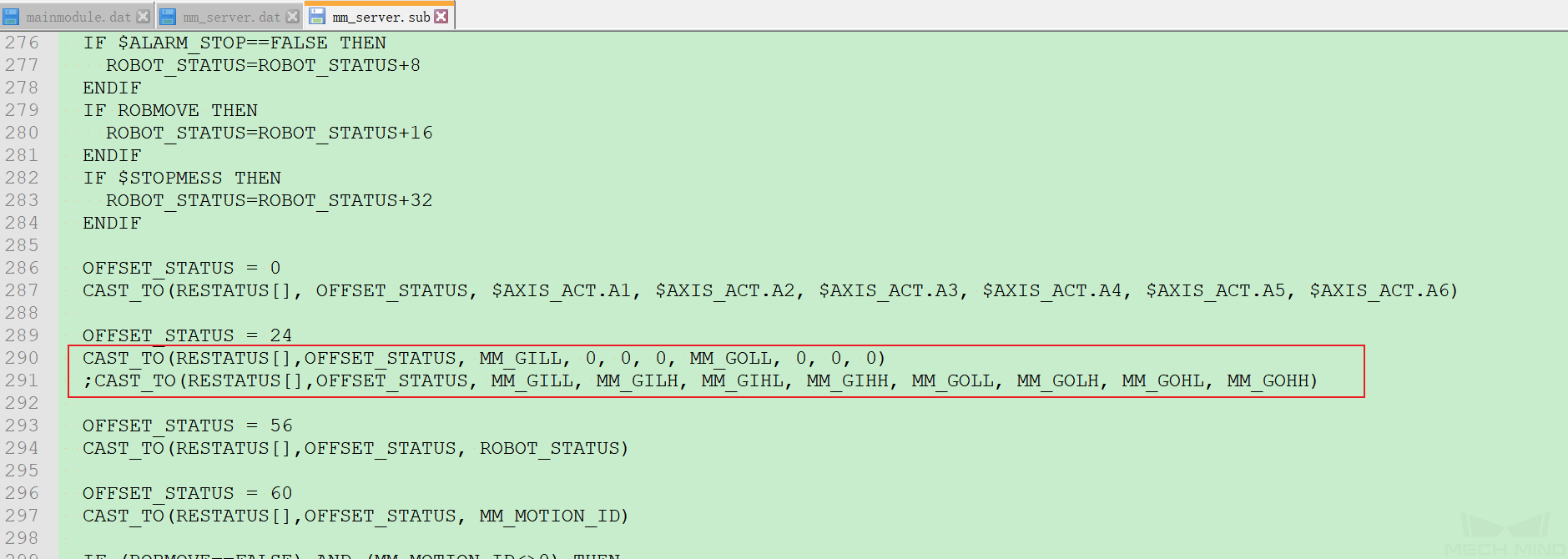
기본적으로 16개의 DI 및 DO 신호를 지원하며 프로그램을 수정하여 64개 신호로 확장할 수 있습니다. 수정 방법: mm_server 파일에서 290행을 비고하고 291행의 비고를 취소합니다.
프로그램 설명과 신호와 관련된 첨부파일¶
명칭 |
설명 |
mm_server.sub |
Robserver 데이터를 수신하고 로봇 포즈, 신호와 상태 데이터를 전송하는 백그라운드 프로그램 |
mm_server.dat |
백그라운드 프로그램과 대응하는 .dat 데이터 파일 |
motion_control.src |
로봇 이동을 컨트롤하는 포그라운드 프로그램 |
mainmodule.src |
마스터 컨트롤 프로그램의 포그라운드 메인 프로그램 |
mainmodule.dat |
마스터 컨트롤 프로그램의 포그라운드 메인 프로그램과 대응하는 .dat 데이터 파일 |
mm_status.xml |
로봇 상태 통신 구성 파일 |
mm_motion.xml: |
로봇 모션 통신 구성 파일 |
플래그 명칭 |
설명 |
$FLAG[1] |
mm_motion 연결 성공의 플래그 |
$FLAG[2] |
mm_motion 데이터 수신 성공의 플래그 |
$FLAG[5] |
mm_status 연결 성공의 플래그 |
$FLAG[6] |
mm_status 데이터 수신 성공의 플래그 |
mainmodule.dat |
마스터 컨트롤 프로그램의 포그라운드 메인 프로그램과 대응하는 .dat 데이터 파일 |
mm_status.xml |
로봇 상태 통신 구성 파일 |
mm_motion.xml: |
로봇 모션 통신 구성 파일 |