다수 피킹 팔레타이징¶
기능 소개
대상 파렛트 패턴의 팔레타이징할 위치와 디팔레타이징될 위치의 상자 조합 결과에 따라 자동으로 다수 피킹 팔레타이징 경로를 계획하여 팔레타이징 효율성을 향상시킵니다.
응용 시나리오
대부분 팔레타이징 시나리오에 적용됩니다.
파라미터 설명
- 이동 태스크 기본 파라미터
상세한 정보는 이동 태스크 기본 파라미터 내용을 참조하십시오.
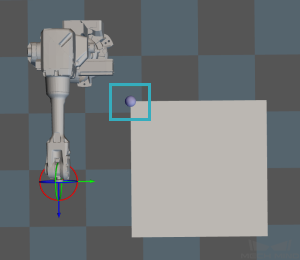
- 우선 각도
팔레타이징을 진행할 때 우선으로 선택하는 파렛트의 각이며 파렛트 포즈에 따라 변화합니다.
OO: 파렛트의 어느 각을 기준각으로 정의하고 OO는 로봇 좌표계를 기준으로 -Y, -X에서의 파렛트 각도를 가리킵니다.
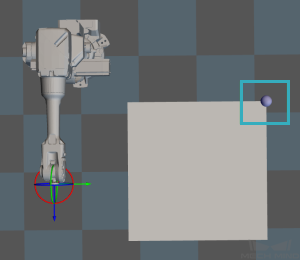
OY: OO의 기준에서 로봇 Y 축 정방향을 따라 이동하는 파렛트 각입니다.
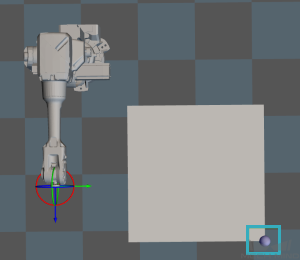
XY: OO의 기준에서 로봇 Y 축과 X 축 정방향을 따라 동시에 이동하는 파렛트 각입니다.
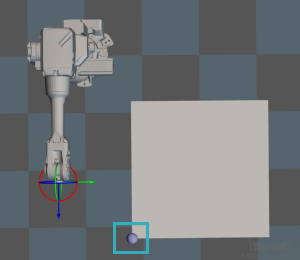
XO: OO의 기준에서 로봇 X 축 정방향을 따라 동시에 이동하는 파렛트 각입니다.
OO
OY
XY
XO
- 상자가 대칭성이 없음
상자 팔레타이징 과정에서 대칭성을 사용하지 않습니다.
- 이미 배치된 파렛트 패턴을 조정하기
기본적으로 이미 배치된 상자는 이동할 수 있습니다. 팔레타이징이 완료되면 모든 상자의 충돌 모델을 대상 파렛트 패턴 상자의 이상적인 위치에 맞추도록 조정합니다.
- 편차 매칭 역치
대상 상자 조합에 있는 각 상자의 좌표와 배치될 대상 위치의 좌표가 XY 평면에서 편차의 최대값.
이 역치를 초과하면 매칭이 실패합니다.
- 배치 기록의 저장 및 로드
파렛트 패턴 기록과 연속 팔레타이징을 지원합니다.
팔레타이징 태스크에 파렛트 패턴이 없으면 JSON 파일에 저장된 파렛트 패턴을 사용합니다. JSON 파일에도 파렛트 패턴이 없으면 오류 알림이 나타납니다.팔레타이징 태스크에 파렛트 패턴이 있으면 해당 파렛트 패턴을 사용하고 JSON 파일에 저장합니다.- 파렛트 정보 파일 경로
 를 클릭하여 저장한 JSON 파일을 선택합니다.
를 클릭하여 저장한 JSON 파일을 선택합니다.- 선택된 오프라인 파렛트
팔레타이징에 사용되는 파렛트 패턴을 선택합니다. 다수 피킹 팔레타이징 태스크에 파렛트 패턴을 생성하지 못하고 사용하는 파렛트 패턴은 외부에서 획득해야 합니다.
응용 예시
다수 피킹 팔레타이징 태스크와 重置任务 을 함께 사용할 때 저번의 팔레타이징 결과를 버리고 선택된 오프라인 파렛트 에서 팔레타이징 패턴을 다시 가져옵니다.