지정축과 기준 방향의 각도는 최소가 되도록 포즈를 조정하기¶
기능 설명
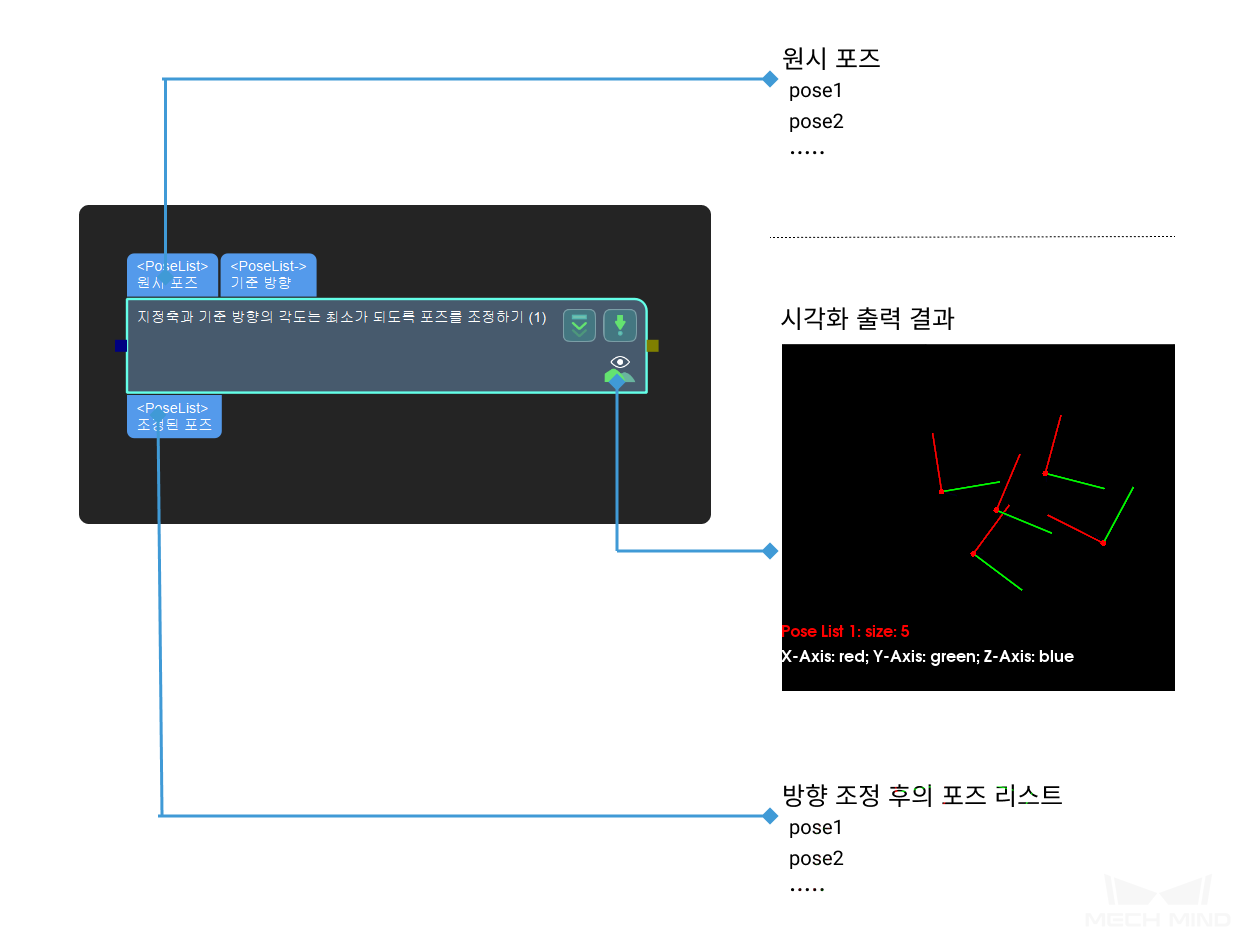
포즈의 한 축을 중심으로 다른 한 축을 기준 방향과 이루는 각도가 가장 작은 방향으로 회전시킵니다.
응용 시나리오
포즈의 방향을 조정해야 하는 각종 시나리오에 많이 사용됩니다.
이 스텝은 구버전이고 가능이 최적화된 새로운 버전의 스텝 목표 방향으로 포즈를 회전하기(제약 없음) 로 바꾸어 3D 벡터를 빠르게 만들기 를 같이 사용하세요.
입력 및 출력
파라미터 설명
입력한 포즈의 방향을 사용하기(Use Input Pose Dir)
사용 시 두 번째 입력 포즈(참고 포즈)가 필요합니다.
매핑 방식(mappingType)
기본값: FirstToAll값 리스트: FirstToAll, OneToOne설명: 입력 포즈와 참고 포즈의 매핑 방식입니다. FirstToAll는 참고 포즈의 첫 포즈를 모든 입력 포즈에 매핑하는 방식입니다. OneToOne의 경우 참고 포즈와 처리할 입력 포즈의 수가 같아야 하고 참고 포즈를 하나씩 입력 포즈와 대응하게 합니다.정열한 좌표축(alignToAxis)
기본값: Z값 리스트: X, Y, Z설명: 참고 포즈의 한 축을 참고 축으로 선택합니다.기준 방향(Reference Dir)
x
기본값: 0설명: 참고 축 x의 방향 벡터입니다.y
기본값: 0설명: 참고 축 y의 방향 벡터입니다.z
기본값: 1설명: 참고 축 z의 방향 벡터입니다.기점으로 참고 축의 방향을 계산하기(Calc Dir By BasePoint)
기점을 사용하기(useBasePoint)
기본값: False값 리스트: True, False설명: 기점으로 참고 축의 방향을 계산 여부입니다.기점 X좌표(basePointX)
기본값: 0설명: 기점 X좌표입니다.기점 Y좌표(basePointY)
기본값: 0설명: 기점 Y좌표입니다.기점 Z좌표(basePointZ)
기본값: 0설명: 기점 Z좌표입니다.상대 Z축을 사용하기(useRelativeZ)
기본값: False값 리스트: True, False설명: 작업 중 인식될 물체의 높이가 변할 것이라면 선택할 수 있습니다.상대 Z축의 값(relativeZValue)
기본값: 0설명: 물체 Z의 방향 벡터 = 기점으로 확인된 벡터가 Z축의 컴포넌트 + 상대 Z축의 값(relativeZValue).좌표축(Axis)
고정 좌표축(fixedAxis)
기본값: Y값 리스트: X, Y, Z설명: 회전축입니다.회전할 좌표축(setAxis)
기본값: Z값 리스트: X, Y, Z설명: 회전이 필요한 축의 방향입니다.
일반적인 사용법
여러 물체의 좌표축의 방향을 통일하는 데 사용됩니다. 예를 들어 포즈를 전송할 때 옵셋을 계산하려면 물체 포즈의 축의 방향이 일치해야 합니다.