포즈 좌표축의 방향을 뒤집기¶
응용 시나리오¶
일반적으로 포즈 후속 처리 단계에 사용되고 모든 포즈의 어떤 좌표축 지향을 동일하게 만듭니다.
입력 및 출력¶
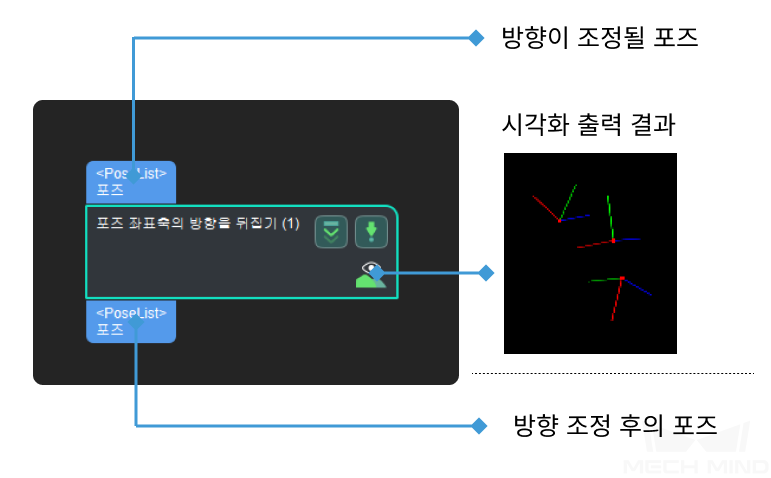
파라미터 설명¶
파라미터 |
파라미터 설명 |
||
시각화 설정 |
선택한 좌표계에서 포인트 클라우드를 표시하기 |
로봇 좌표계 |
로봇 좌표계에서 포인트 클라우드를 표시하기 |
카메라 좌표계 |
카메라 좌표계에서 포인트 클라우드를 표시하기 |
||
포즈 시각화 설정 |
출력 포즈만 표시하기. |
처리된 후의 포즈를 표시하기 |
|
입력 포즈만 표시하기. |
처리하기 전의 포즈를 표시하기 |
||
입력과 출력 포즈를 함께 표시하기 |
처리 전/후의 포즈를 모두 표시하기 |
||
축 설정 |
뒤집히게 될 축 |
X, Y, Z |
뒤집히게 될 축을 선택합니다. |
방향의 유형 |
정방향 |
포즈의 축을 세계 기준 좌표계의 축에서 정방향으로 조정하는 것입니다. |
|
부방향 |
포즈의 축을 세계 기준 좌표계의 축에서 부방향으로 조정하는 것입니다. |
||
회전할 때의 기준 축 |
X, Y, Z |
어느 축을 중심으로 회전할지 선택합니다. |
|
응용 예시¶
파라미터 조절 설명¶
시각화 설정
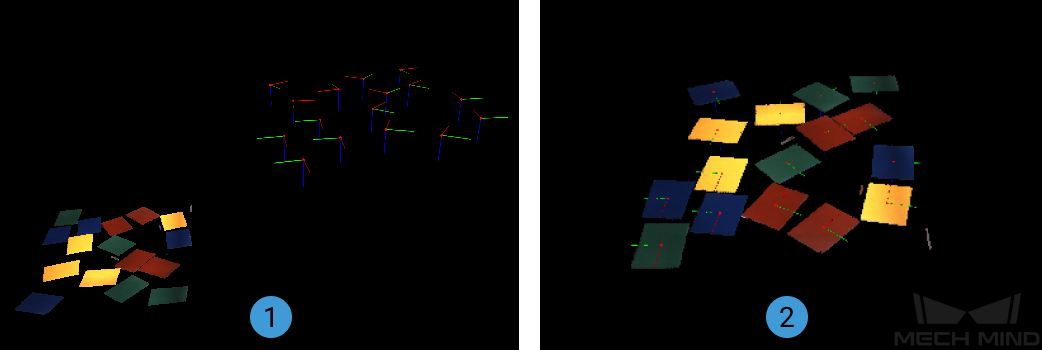
- 선택한 좌표계에서 포인트 클라우드를 표시하기
- 기본값: 로봇 좌표계값 리스트: 로봇 좌표계, 카메라 좌표계(디버그 출력 창에서 포인트 클라우드 및 좌표를 확인할 수 있음).설명: 로봇과 카메라 좌표계를 선택하는 경우의 포인트 클라우드 표시 효과가 아래 그림1, 2와 같습니다.
- 포즈 시각화 설정
- 기본값: 출력 포즈만 표시하기.값 리스트:입력 포즈만 표시하기, 출력 포즈만 표시하기, 입력 및 출력 포즈를 모두 표시하기.설명: 처리 후의 포즈만 표시하기(기본값), 처리 전의 포즈만 표시하기, 처리하기 전/후의 포즈를 모두 표시하기.
축 설정
- 뒤집히게 될 축
- 기본값: Z값 리스트: X, Y, Z.설명:회전해야 할 축의 유형을 선택합니다.
- 방향의 유형
- 기본값: 부방향.값 리스트: 부방향(포즈의 축을 세계 좌표계의 부방향으로 조정하는 경우, 부방향과의 협각이 90도 보다 큰 축이 조정될 것임). 정방향(포즈의 축을 세계 좌표계의 정방향으로 조정하는 경우, 정방향과의 협각이 90도 보다 큰 축이 조정될 것임).설명: 뒤집히게 될 축의 방향. 예: 파라미터 뒤집히게 될 축 의 유형이 Z 인 경우 방향의 유형 은 정방향 이며 이때 세계 좌표계 정방향과의 협각이 90도보다 작은 포즈의 Z 축이 조정되지 않으며 90도 보다 큰 포즈의 Z 축은 기준축을 중심으로 180도로 조정될 것입니다.
- 회전할 때의 기준 축
- 기본값: X값 리스트: X, Y, Z.설명: 어느 축을 중심으로 회전하는지 선택합니다.
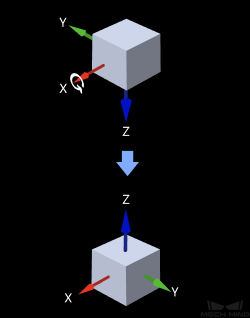
힌트
뒤집어야 하는 축과 회전기준 축은 동일한 축이 될 수 없습니다.
예시: 여기서 Z축을 뒤집히게 될 축으로 선택하고, X축을 회전축으로 선택하는 경우는 다음 그림과 같습니다.