스타트
첫 번째 애플리케이션을 시작하기
소프트웨어 사용 가이드
로봇 통신 설정 가이드
응용 가이드
부록
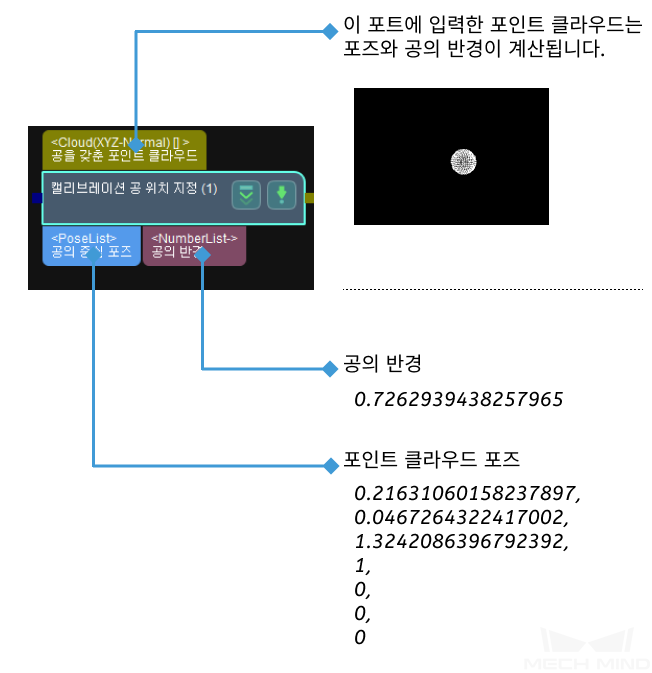
각 입력한 포인트 클라우드에서 공(캘리브레이션 공) 하나를 피팅하고 각 캘리브레이션 공의 중심점 포즈와 반경을 출력합니다.
이 스텝은 측정 시나리오에서 캘리브레이션 공을 찾아 카메라와 로봇의 온도 드리프트를 보상하는 데 사용됩니다.
파라미터가 없음.