타원형 구멍 감지 및 측정¶
기능 설명¶
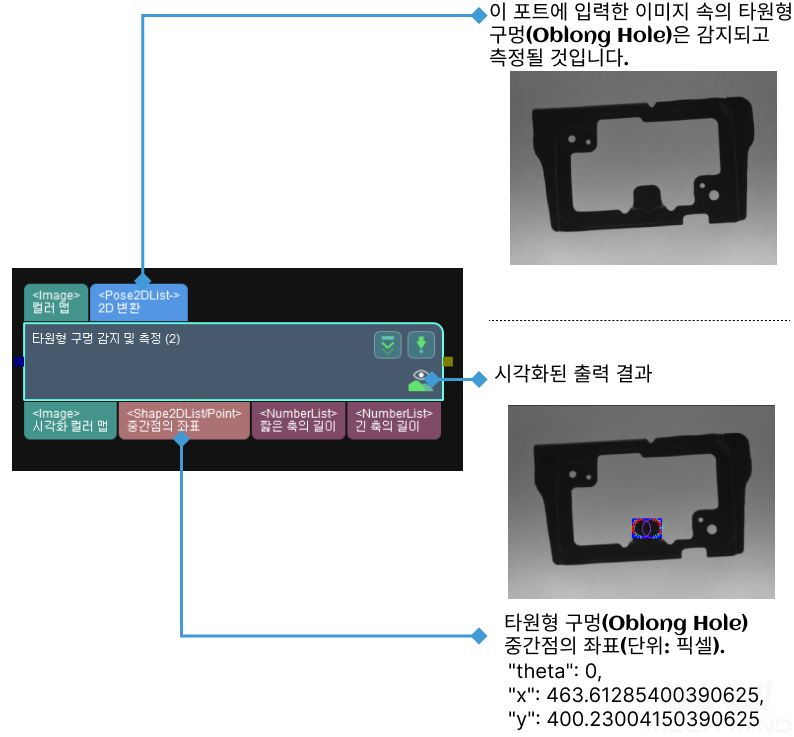
입력한 이미지 속의 타원형 구멍(Oblong Hole)을 감지하고 측정합니다.
응용 시나리오¶
이 스텝은 측정 시나리오에서 후속 물리적 사이즈를 계산하기 위해 이미지 속 타원형 구멍(Oblong Hole)의 위치와 치수(단위: 픽셀)를 감지하는 데 사용됩니다.
입력 및 출력¶
파라미터 설명¶
파라미터 |
파라미터 설명 |
ROI |
감지 범위 설정 |
위치 및 방향 보정 |
2D 변환을 통해 ROI의 위치 및 방향을 보정합니다. |
Canny 에지 감지 낮은 역치 |
두 역치를 통해 에지를 판단합니다. |
Canny 에지 감지 높은 역치 |
|
가우시안 필터 계수 |
에지감지 프레임 내에서 수직으로 이미지를 필터링하는 데 사용됩니다. |
에지 극성 유형 |
물체 에지로 간주되는 그레이스케일 변환을 지정하는 데 사용됩니다. |
에지 선택 |
감지한 에지 포인트를 선택하여 완전한 에지를 피팅하는 데 사용됩니다. |
파라미터 조절 설명¶
- ROI
- 기본값: 0설명: 툴바에 있는 측정 모드 버튼을 클릭하여 측정 모드 화면으로 들어갑니다. 다음으로 이 스텝을 선택하고 감지할 구역을 선택합니다. 선택 박스는 이미지 왼쪽 상단 모서리에 있으며 마우스를 선택 박스에 이동하여(우선 이미지 크기를 조정하십시오) 화살표 마우스가 손 모양 마우스가 되면 마우스를 길게 눌러 "선택 박스를 드래그"하거나 "선택 박스의 크기를 설정"합니다.
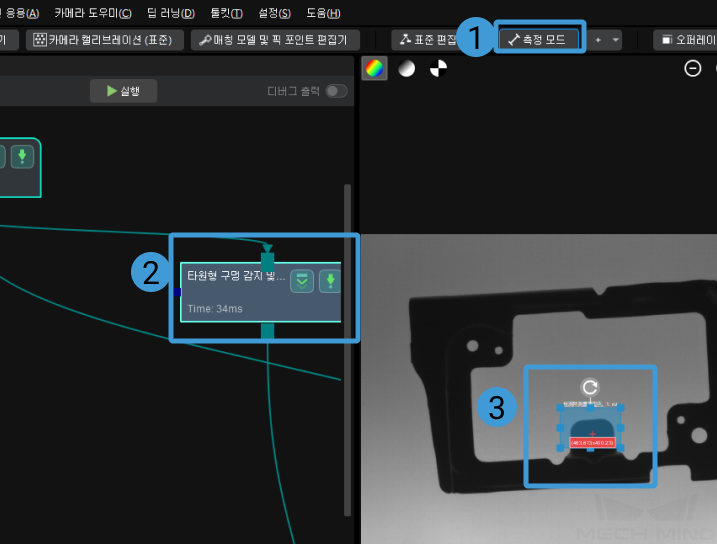
선택한 후 아래 그림과 같이 ROI 파라미터에서 각 수치를 표시합니다.

- 위치 및 방향 보정
- 기본값: 선택하지 않음.설명: 이 파라미터를 선택하면 입력한 2D 변환에 근거하여 ROI를 이미지 속의 물체와 맞추는 위치와 방향으로 변환합니다.
- Canny 에지 감지 낮은 역치
- 기본값: 40설명: 두 역치는 감지된 에지의 유효성을 확인하는 데 사용됩니다. 계조도가 높은 역치보다 큰 에지는 실제 에지로 간주됩니다. 계조도가( 낮은 역치,높은 역치) 범위 내에 있는 에지는 실제 에지와 연결되어야 실제 에지로 간주될 수 있습니다. 계조도가 낮은 역치보다 작은 에지는 고려되지 않습니다. Soble operator는 계조도를 계산하는 데 사용되며 계조도의 최대값은 1440입니다.
- Canny 에지 감지 높은 역치
- 기본값: 100설명: 두 역치는 감지된 에지의 유효성을 확인하는 데 사용됩니다. 계조도가 높은 역치보다 큰 에지는 실제 에지로 간주됩니다. 계조도가( 낮은 역치,높은 역치) 범위 내에 있는 에지는 실제 에지와 연결되어야 실제 에지로 간주될 수 있습니다. 계조도가 낮은 역치보다 작은 에지는 고려되지 않습니다. Soble operator는 계조도를 계산하는 데 사용되며 계조도의 최대값은 1440입니다.
- 가우시안 필터 계수
- 기본값: 1설명: 에지감지 프레임 내에서 수직으로 이미지를 필터링하는 데 사용되며 권장값은 1입니다.
- 에지 극성 유형
- 기본값: Both값 리스트: White To Black, Black To White, Both설명: 이 파라미터는 물체의 에지로 간주되는 그레이스케일 변화를 지정하는 데 사용됩니다. 그레이스케일 변화는 에지 감지 프레임에서 위에서 아래로의 변화를 의미합니다.
White To Black: 감지 프레임에서 White에서 Black로 변하는 곳은 물체의 에지로 간주됩니다.
Black To White: 감지 프레임에서 Black에서 White로 변하는 곳은 물체의 에지로 간주됩니다.
Both: 감지 프레임에서 Black에서 White로, 또는 White에서 Black로 변하는 곳은 물체의 에지로 간주됩니다.
- 에지 선택
- 기본값: First값 리스트: First, Second, Last, All.설명: 각 에지 감지 프레임에서 이 파라미터를 사용하여 감지된 에지 포인트를 선택하여 완전한 에지를 피팅합니다.
First: 에지 감지 프레임에서 위에서 아래로의 첫 번째 포인트를 선택하여 피팅에 사용합니다.
Second: 에지 감지 프레임에서 위에서 아래로의 두 번째 포인트를 선택하여 피팅에 사용합니다.
Last: 에지 감지 프레임에서 위에서 아래로의 마지막 포인트를 선택하여 피팅에 사용합니다.
All: 에지 감지 프레임에 있는 모든 포인트를 선택하여 피팅에 사용합니다.