キャリブレーションの操作手順¶
YASKAWAロボットをキャリブレーションする方法について紹介します。
本節を開始する前に、以下のことを確認してください。
ロード手順 を参照してロボットプログラムのロードを完了し、Mech-Centerとの接続を確立しました。
ロボットハンド・アイ・キャリブレーションの使用ガイド を確認しました。
本節で紹介する自動キャリブレーションは、インターフェイスを介して、複数のキャリブレーションポイントでデータを取得します。以下の場合、本節をスキップしてください。
ビジョンシステムによるティーチングが可能であれば、Mech-Vizでキャリブレーションポイントを可視化して確認できるため、直に Mech-Vision から 自動キャリブレーション を実行することを推奨します。
インターフェイスでキャリブレーションを行うが、必要な撮像枚数が少ない場合は、 手動キャリブレーション を実行できます。
自動キャリブレーションのステップ¶
主に次の手順が含まれます。
キャリブレーションするためのプログラムを開く¶
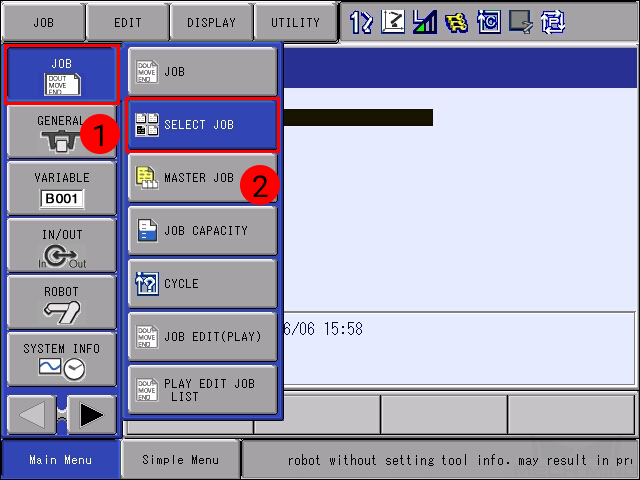
ロボットをティーチモードに切り替え、 をクリックします。カーソルを MM_AUTO_CALIB に移動して、ティーチペンダントの SELECT を押します。
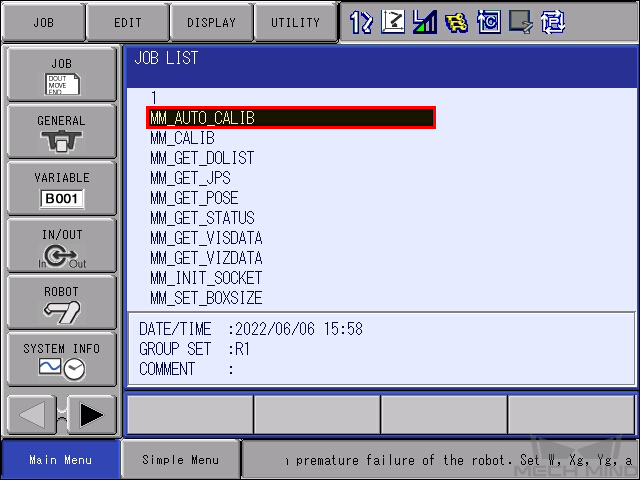
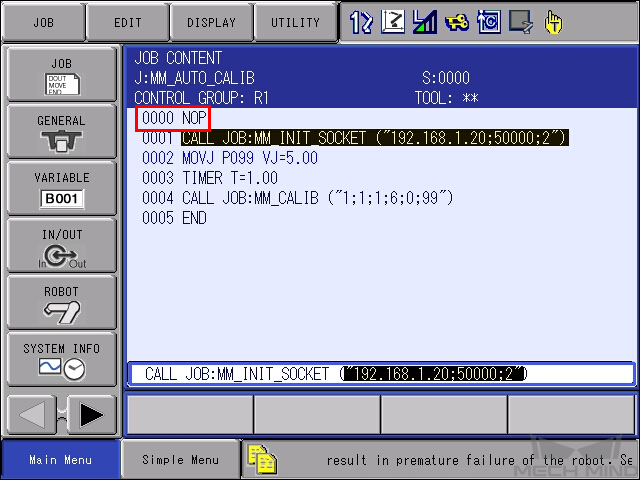
プログラムを選択した後、以下のような画面が表示されます。
キャリブレーションの最下層点を教示¶
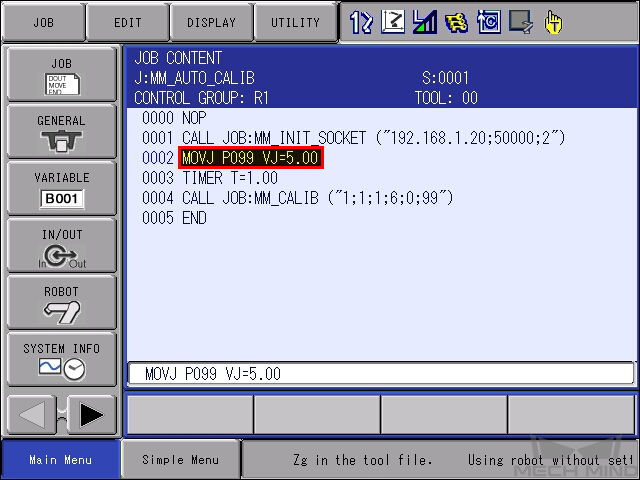
ロボットを主動でキャリブレーションの最下層点に移動させます。カーソルを MOVJ P099 VJ=5 に移動し、ティーチペンダント DIRECT OPEN を押します。
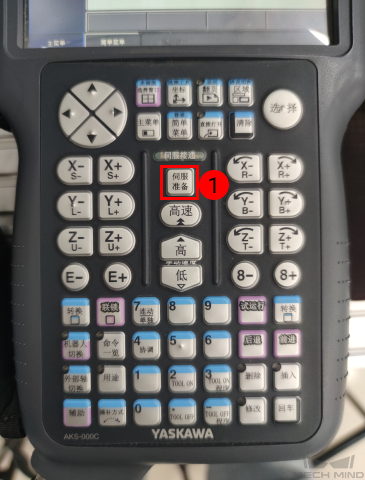
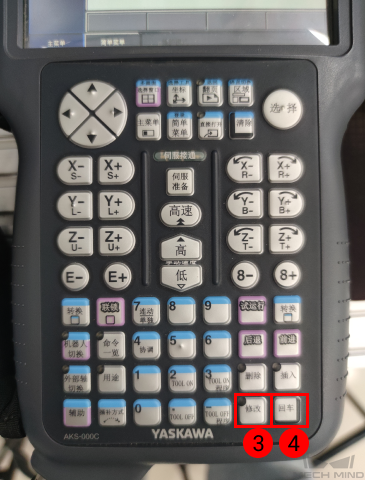
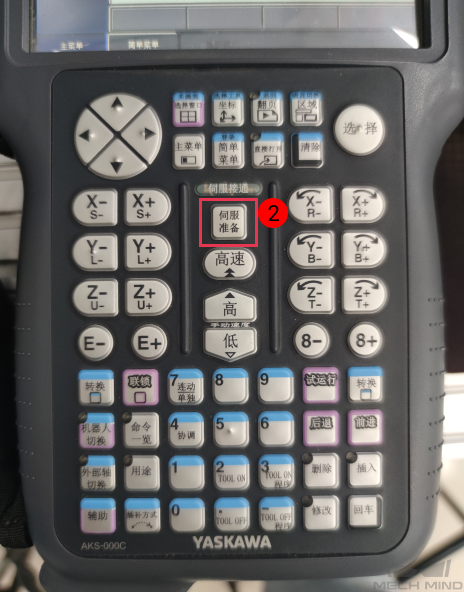
ティーチペンダントの SERVO ON READY を押した後、ティーチペンダントの背面のイネーブルスイッチを押しながら、 MODIFY を押してから ENTER を押します。位置変数 P099 を現在の位置に変更し、「TOOL」が 00 であることを確認します。


ティーチペンダント DIRECT OPEN をもう一度押すと、 JOB の画面に戻ります。
プログラムを実行¶
カーソルを0000行目に移動し、モードスイッチをPLAYモードに回し、ロボットを リピートモード に切り替えます。その後、ティーチペンダントの SERVO ON READY を押します。

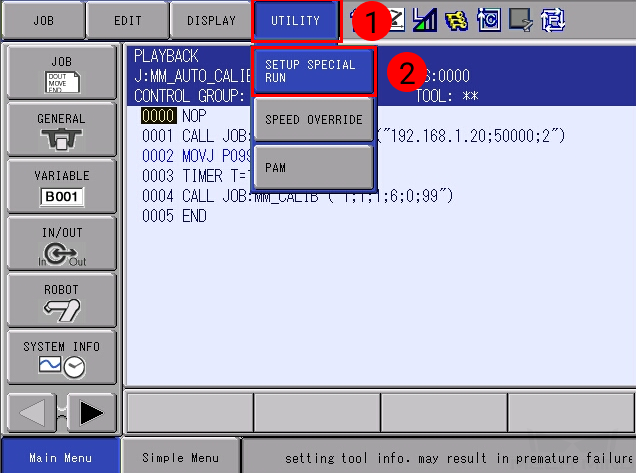
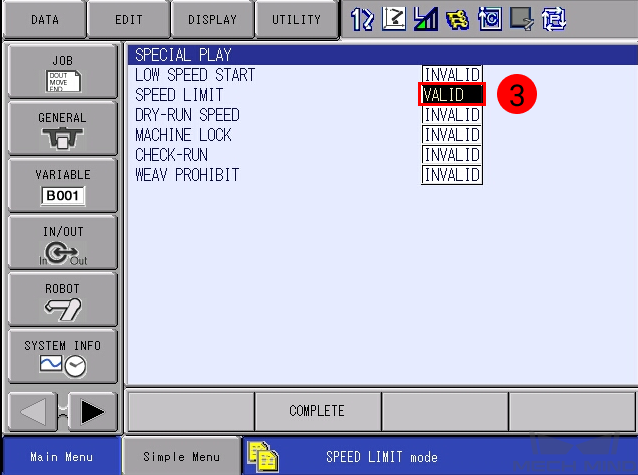
低い速度で動作する必要がある場合、 をクリックして、 SPEED LIMIT を VALID に変更します。
その後、 START ボタンを押します。ボタンが点灯すると、プログラムの実行が開始されます。

注意
異常が発生した場合は、すぐに PAUSE または EMERGENCY STOP ボタンを押してください。
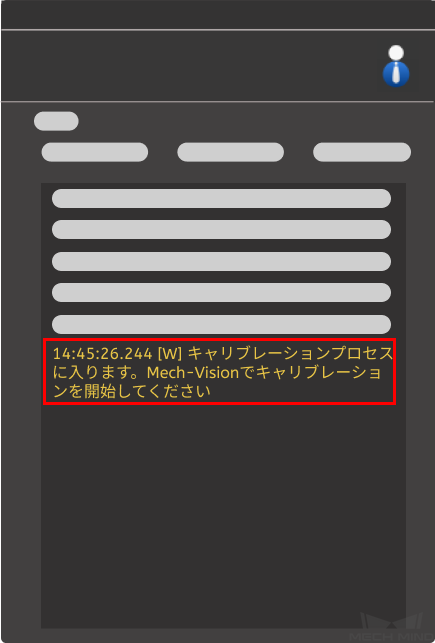
Mech-Centerのログに以下のメッセージが表示されると、次にMech-Visionでキャリブレーションパラメータを設定します。
Mech-Visionでキャリブレーションを実行¶
Mech-Visionを起動し、 を順番にクリックして、キャリブレーションツールを起動します。

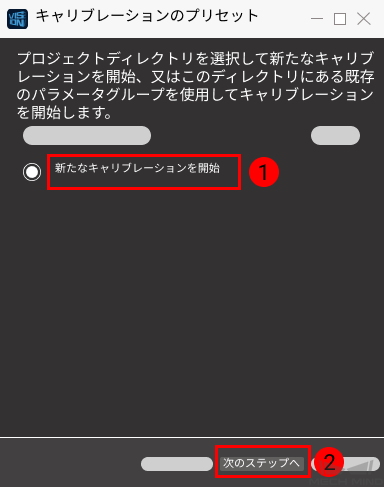
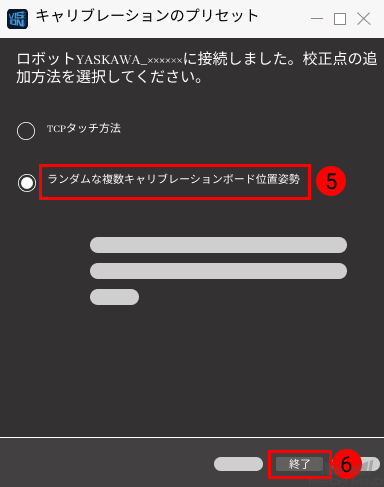
新たなキャリブレーションを開始 にチェックを入れ、カメラの取り付け方式を選択します。ロボットの軸数を選択した後、 ランダムな複数キャリブレーションボード位置姿勢 を選択してキャリブレーション画面に入ります。

ヒント
ロボットが検出されない場合は、接続に異常あります。ロボットプログラムを再実行してください。
キャリブレーションツールのガイダンスに従い、キャリブレーションパラメータを設定します。 既定経路に沿ってロボットを移動して画像を取得 をクリックし、自動キャリブレーションを実行します。
注意
ロボットが60秒以内に次のキャリブレーションポイントに到達しない場合、タイムアウトエラーが発生します。この場合、プログラム一覧からキャリブレーションするためのプログラムを再度選択し、最初の行から実行し、Mech-Visionでキャリブレーションを再開する必要があります。