ロード手順¶
本節では、VizによりYASKAWAロボットをティーチングする方法について説明します。主に次の手順が含まれます。
注釈
YASKAWAのロボットティーチペンダント画面はシリーズによって異なります。本節では、YRC1000を使用します。
コントローラとソフトウェアバージョンを確認¶
コントローラ:YRC1000(YRC1000microを除く)およびDX200。
コントローラのソフトウェアバージョン:
YRC1000:要件はありません。
DX200:DN2.25.00A(US/CN)-00またはそれ以後のバージョン。
機能要件:開発されたVizとの通信プログラムをロボットにロードするには、ロボットのMotoPlusおよびイーサネット機能を有効にする必要があります。
注意
YASKAWAロボットのシリーズによってVizティーチングのファイルも異なります。
ネットワーク接続を確立¶
ハードウェアの接続¶
YRC1000シリーズのコントローラを使用する場合、産業用コンピュータLANケーブルのもう一方の端をコントローラのCPU基板のLAN2(CN106)ネットワークポートに接続します。DX20シリーズのコントローラを使用する場合、産業用コンピュータLANケーブルのもう一方の端をコントローラのCPU基板のCN104ネットワークポートに接続します。
注釈
YRC1000シリーズのコントローラについては以下の点にご注意ください。
LAN1ネットワークポートはティーチングペンダントの接続に使用されますので、産業用コンピュータのLANケーブルには接続できません。
LAN2ネットワークポートが占有されている場合は、産業用コンピュータのLANケーブルをLAN3ポートに接続できます。
IP設定¶
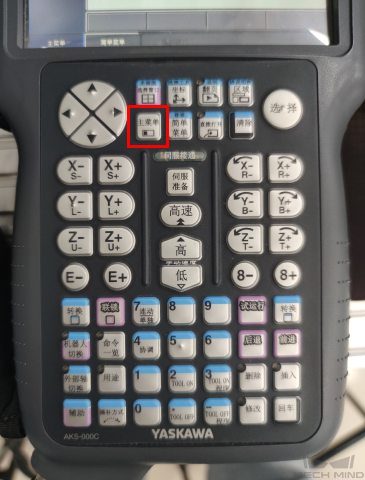
Main Menu キーを押したままにして電源を入れ、メンテナンスモードを開始します。
注意
電源を入れた時に Main Menu キーを押さないと、通常モードになります。
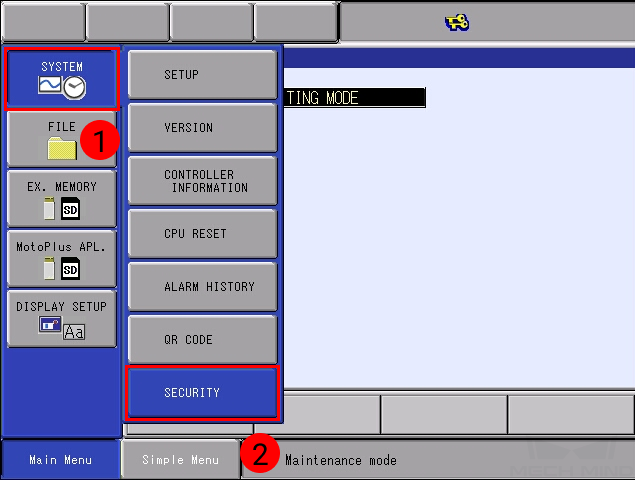
をクリックし、 MANAGEMENT MODE を選択します。
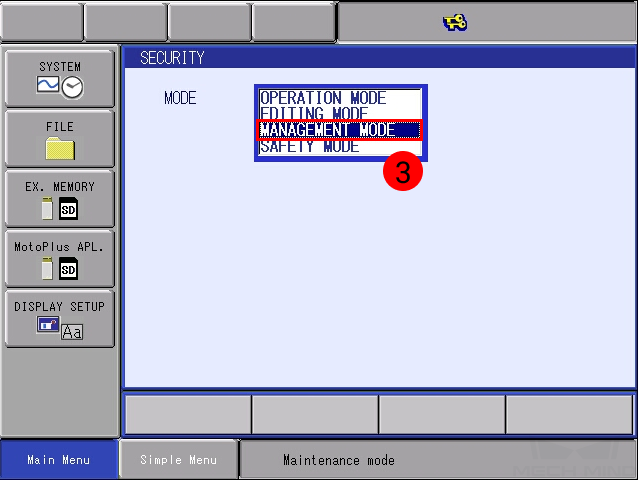
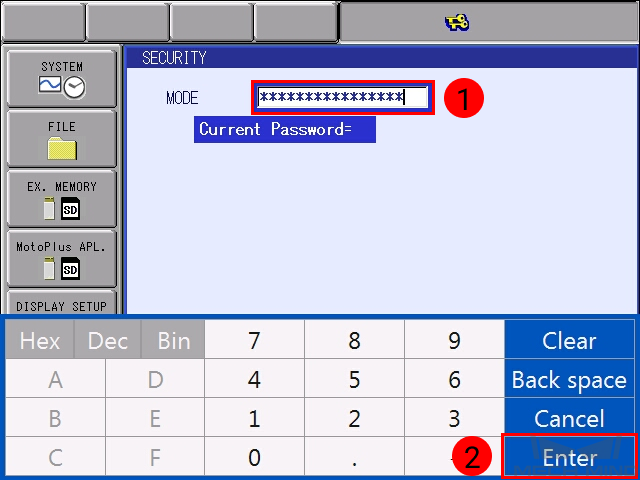
パスワードを入力し、 Enter をクリックして MANAGEMENT MODE になります。デフォルトのパスワードは16の「9」です。

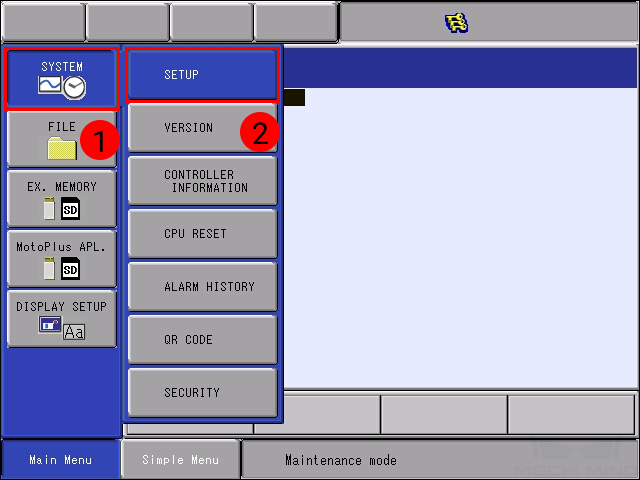
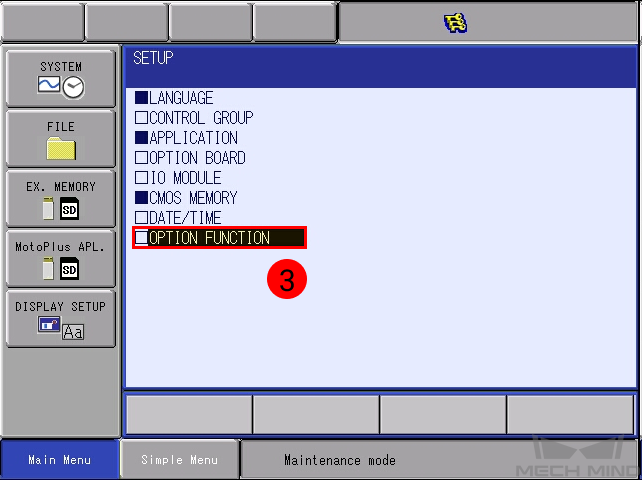
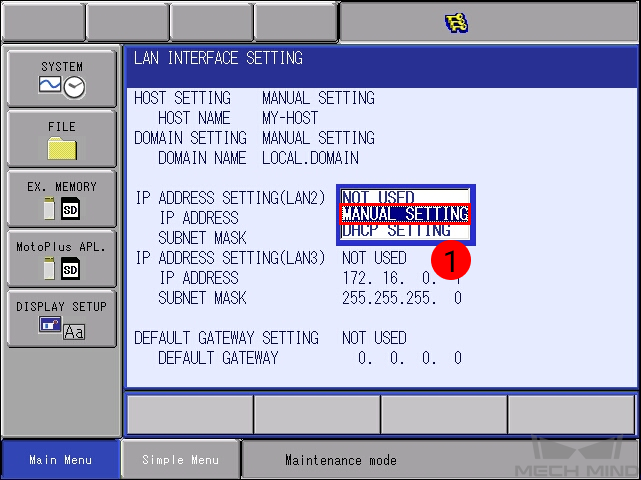
をクリックし、オプション機能の画面に入ります。次に、 LAN INTERFACE SETTING を選択してLANインターフェイスの設定画面に入ります。
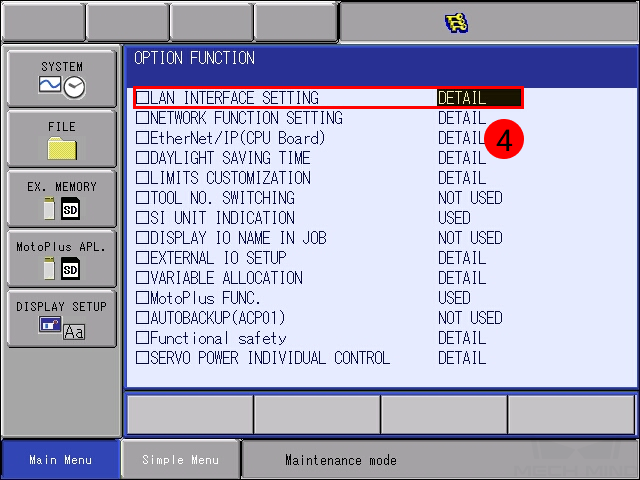
LAN2のIPアドレスはLAN2ポートで設定する必要があります。ドロップダウンメニューで MANUAL SETTING を選択し、 IPアドレス と サブネットマスク(サブネットマスク) を正しく設定してください。
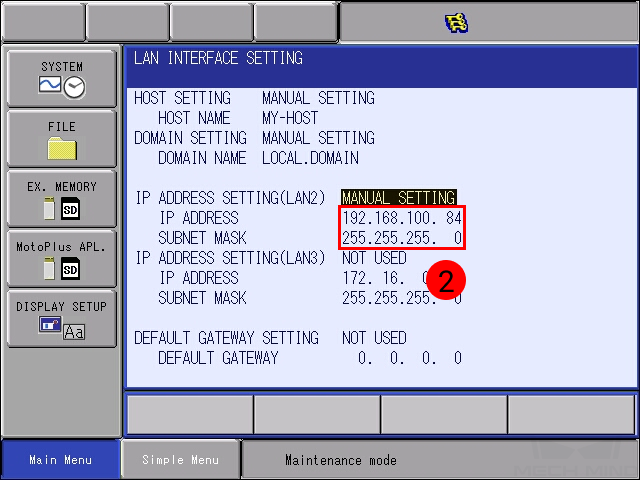
注意
LAN2ポートのIPアドレスと産業用コンピュータのIPアドレスは、同じネットワークセグメントにある必要があります。
サブネットマスクを「255.255.255.0」に設定します。
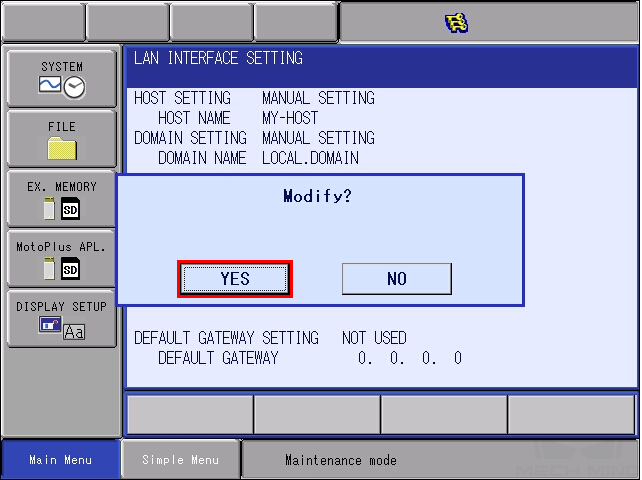
IPアドレスを変更した後、ティーチペンダントの右下隅にある ENTER キーを押し、ポップアップウィンドウで Yes を選択します。
ファイルをロボットにロード¶
注意
ロボットプログラムをロードする前に、フォアグラウンドプログラムをバックアップする前に、YASKAWAロボットの「取扱説明書-全般」の第7章をご参照ください。
事前準備¶
Mech_RobServフォルダ内のYASKAWAロボットのロードファイル(YRC1000.out)をUSBメモリのルートディレクトリにコピーします(ファイルパスは
XXXX/Mech-Center-xxx/Robot_Server/Robot_FullControl/yaskawaです)。USBメモリをティーチペンダントの背面にあるUSBポートに挿入します。
注意
USBメモリにコピーされるロードファイルは、使用されるコントローラの型番と一致する必要があります。
ロードを実行¶
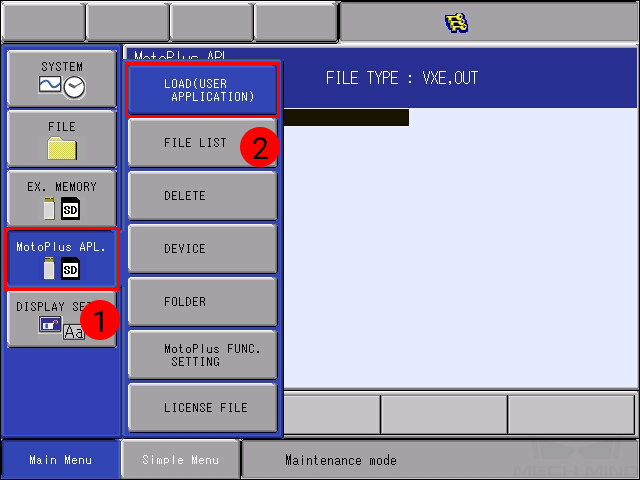
Maintenance mode で を選択します。
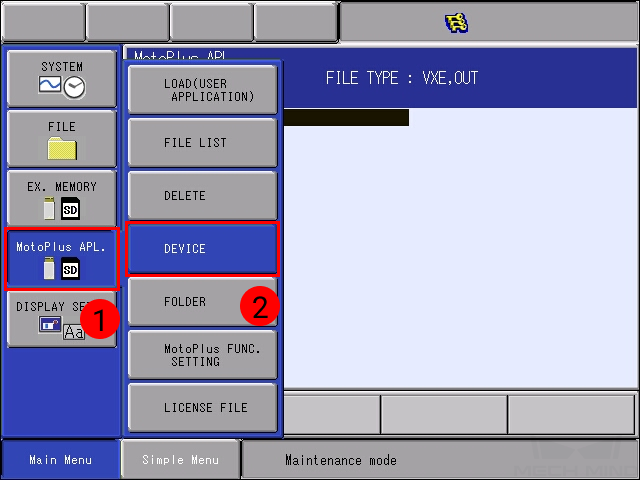

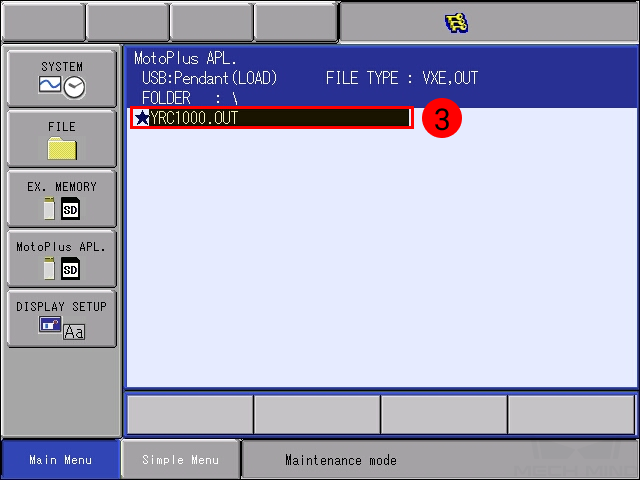
を選択し、 X.out を選択します。次に、 Enter をクリックし、 YES を選択してインストールします。

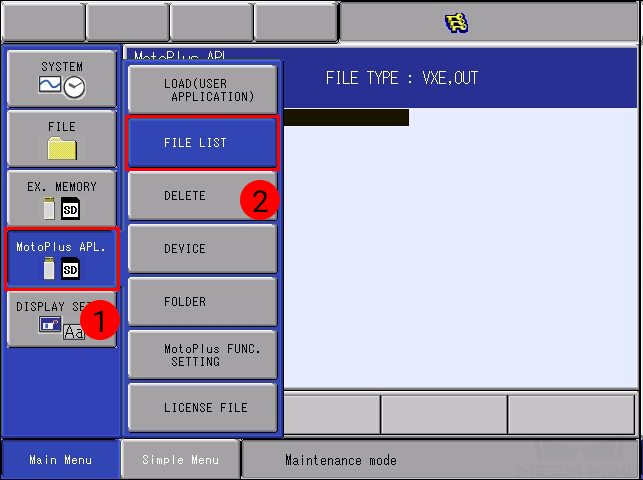
正常にインストールした後、 をクリックすればインストールされたファイルが表示されます。

コントローラを再起動し(メインメニューボタンを押す必要はありません)、通常モードに入ると、 YRC1000.out ファイルがバックグラウンドで自動的に実行されます。キーを PLAY 位置 に回して、Mech-Centerソフトウェアを使ってロボットに接続することができます。

ロボットの接続状態をテスト¶
詳しくは、ロボットの接続状態をテスト をご参照ください。
ロボットが起動するとデフォルトの速度(100%)で動作されますので、安全のためにMech-Vizプロジェクトを実行する前にロボットの速度を調整してください。
ヒント
速度調整などの操作は、通常モードで実行する必要があります。
をクリックし、プログラム一覧の画面に入ります。
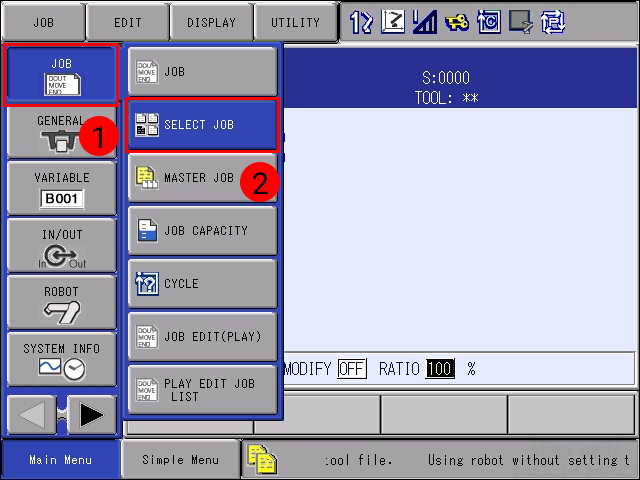
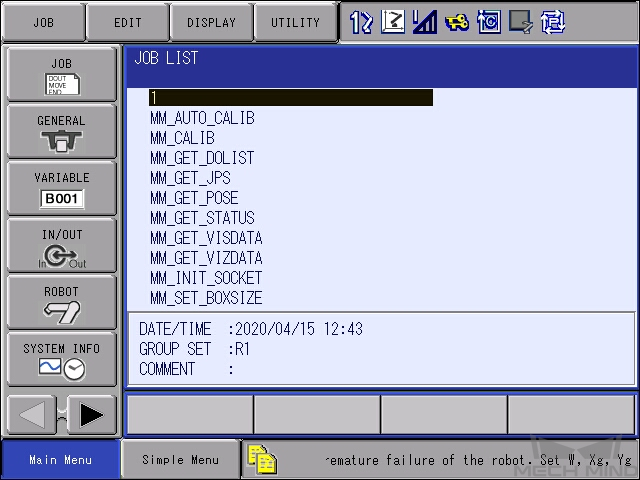
プログラムを選択した後、ティーチペンダントの SELECT ボタンを押して、以下のような画面に入ります。

次に、 をクリックして速度調整の画面に入った後、下部にある SPEED ADJUSTMENT を選択します。
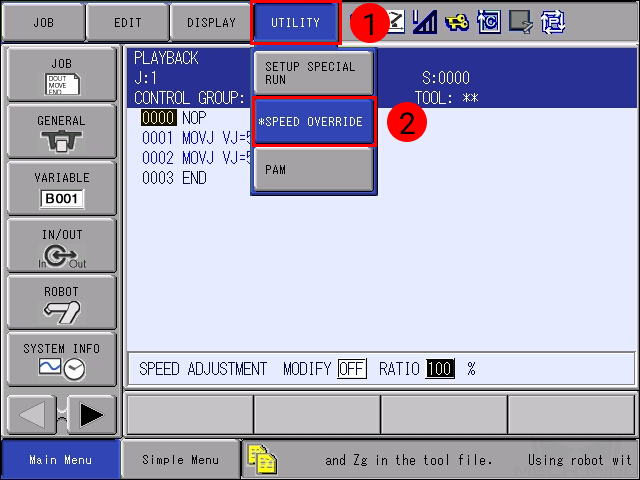
注意
下部にある SPEED ADJUSTMENT が選択されていない場合、その中のパラメータは変更できません。
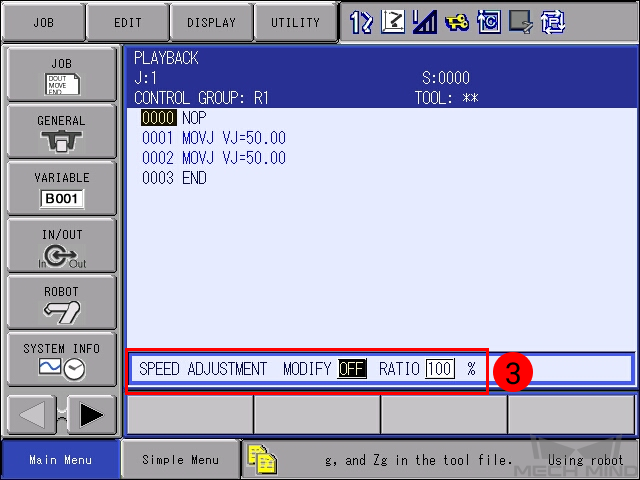
SPEED ADJUSTMENT で OFF を選択し、ティーチペンダントの SELECT ボタンを押して ON に切り替えます。
注意
OFF を ON に切り替えずに、速度を調整することはできません。
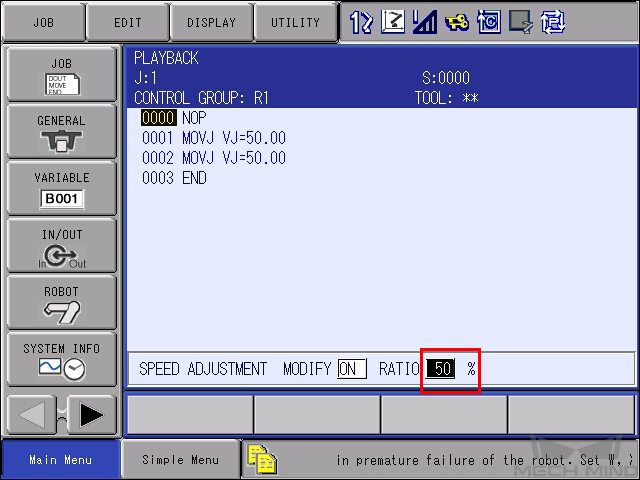
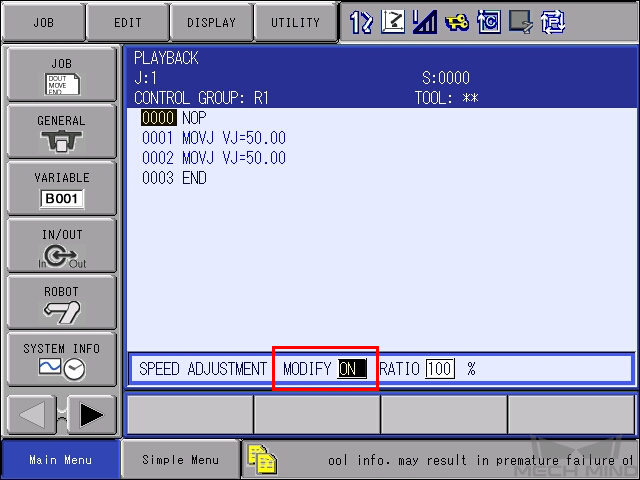
同様に、「RATIO」の後の数値を選択し、ティーチペンダントの SELECT ボタンを押して、速度値調整の画面に入ります。値を入力した後、ティーチペンダントの Enter ボタンを押して、速度の調整は完了します。
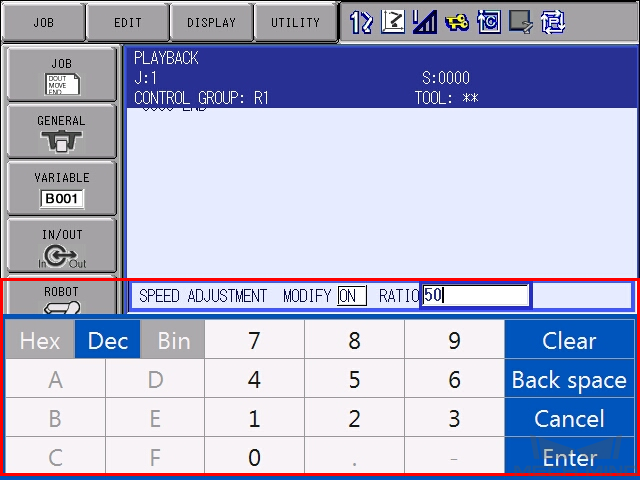
上記に従って速度調整が完了した後、下図のような画面が表示されます。