Vizとの通信プログラム¶
プログラムモジュール¶
.src:プログラムファイル。
.dat:データファイル。
mm_server:Robserverデータを受信する、ロボットの位置姿勢、信号およびステータスデータを送信するためのバックグラウンドプログラム。
motion_control:ロボット動作を制御するためのフォアグラウンドプログラム。
mainmodule:メインプログラム。
mm_status.xmlおよびmm_motion.xml:通信のコンフィグファイル。
信号¶
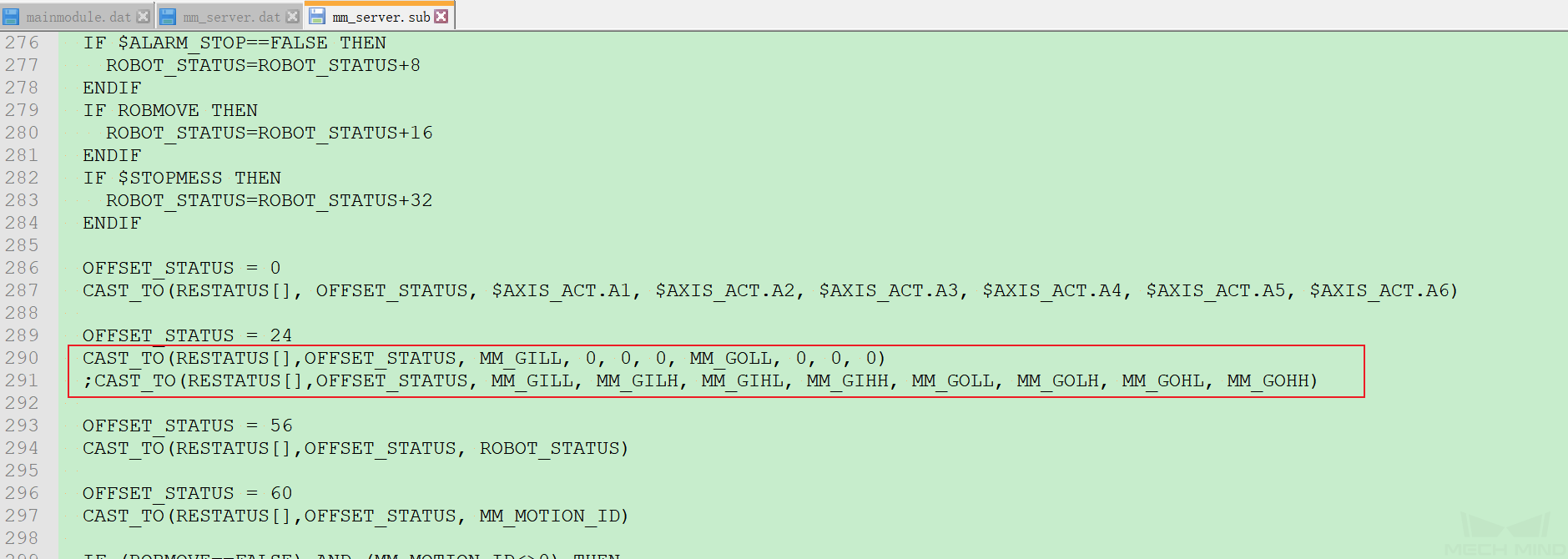
デフォルトで16のDIおよびDO信号に対応可能です。また、プログラムを変更することで64の信号に拡張できます。mm_serverファイルの行290に注釈を付け、行291の注釈を削除すれば、信号を変更することができます。
プログラム¶
プログラム名 |
ディスクリプション |
mm_server.sub |
Robserverからのデータを受信する、ロボットの位置姿勢、信号およびステータスデータを送信するためのバックグラウンドプログラム |
mm_server.dat |
バックグラウンドプログラムが対応する .datデータファイル |
motion_control.src |
ロボット動作を制御するためのフォアグラウンドプログラム |
mainmodule.src |
Vizとの通信プログラムのフォアグラウンドメインプログラム |
mainmodule.dat |
主動制御プログラムのフォアグラウンドメインプログラムが対応する.datデータファイル |
mm_status.xml |
ロボット状態通信のコンフィグファイル |
mm_motion.xml: |
ロボット動作通信のコンフィグファイル |
内部フラグ名 |
ディスクリプション |
$FLAG[1] |
mm_motionが成功に接続したときのフラグ |
$FLAG[2] |
mm_motionがデータを受信したときのフラグ |
$FLAG[5] |
mm_statusが成功に接続したときのフラグ |
$FLAG[6] |
mm_statusがデータを受信したときのフラグ |
mainmodule.dat |
主動制御プログラムのフォアグラウンドメインプログラムが対応する.datデータファイル |
mm_status.xml |
ロボット状態通信のコンフィグファイル |
mm_motion.xml: |
ロボット動作通信のコンフィグファイル |