複数の把持位置姿勢にマッピング¶
機能のディスクリプション
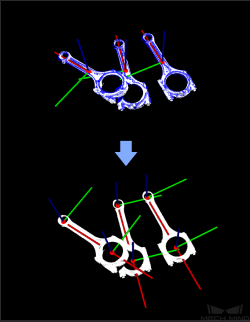
物体の幾何学的中心と設定されたマッピング関係を使用して、物体の他の把持位置姿勢を計算します。
使用シーン
把持位置姿勢が幾何学的中心と一致しない場合、または複数の把持位置姿勢がある場合にこのステップが必要です。以下の特定方法を使用してシーン内の物体にロボット制御ソフトウェアに送信する複数の把持位置姿勢を追加してください。
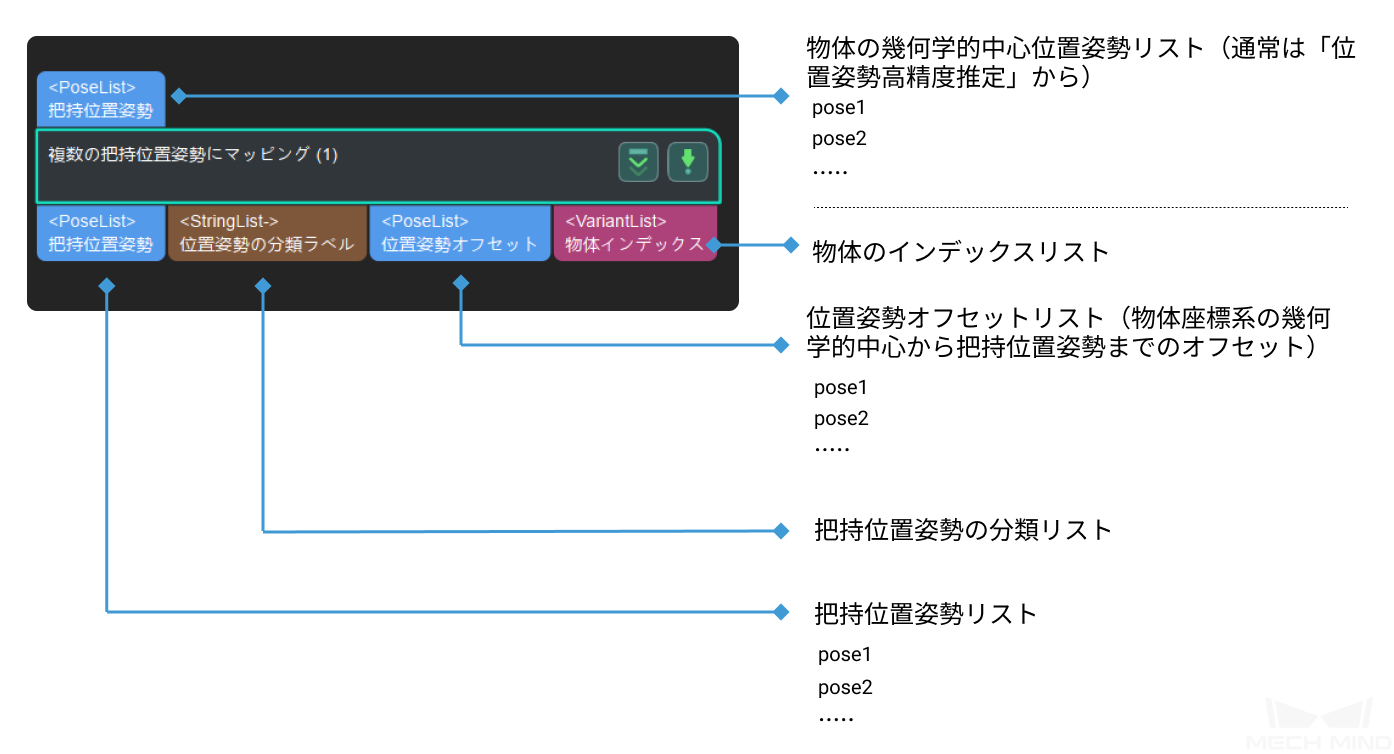
このステップで出力した「把持位置姿勢」は 位置姿勢を変換 の「基準位置姿勢」ポートにつなぐ必要があります。
このステップで出力した「位置姿勢オフセット」は 位置姿勢を変換 の「元の位置姿勢」ポートにつなぐ必要があります。
入力と出力
パラメータの説明
幾何学的中心ファイル
モデルに対象物の幾何学的中心の位置姿勢調整説明:幾何学的中心ファイルを保存する絶対パスあるいは相対パス。配置位置姿勢ファイル
対象物の配置位置姿勢調整説明:配置位置姿勢ファイルを保存する絶対パスあるいは相対パス。把持位置姿勢ファイル
モデルに対象物の把持位置姿勢調整説明:把持位置姿勢ファイルを保存する絶対パスあるいは相対パス。位置姿勢ラベルファイル
把持位置姿勢に対応するラベルファイル調整説明:ラベルファイルを保存する絶対パスあるいは相対パス。