点群の法線ベクトルを計算してフィルタリング¶
機能のディスクリプション
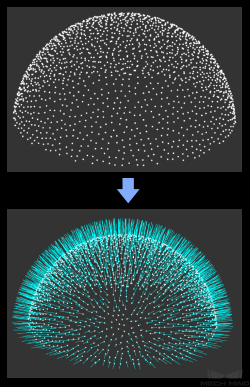
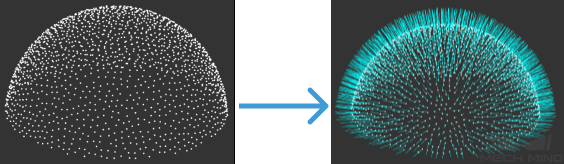
点群の法線ベクトルを計算し、外れ値を除去します。
使用シーン
元の点群に法線ベクトルを追加し、外れ値を除去します。通常、“カメラから画像を取得”、“深度画像を点群に変換”ステップの後で使用されます。
入力と出力
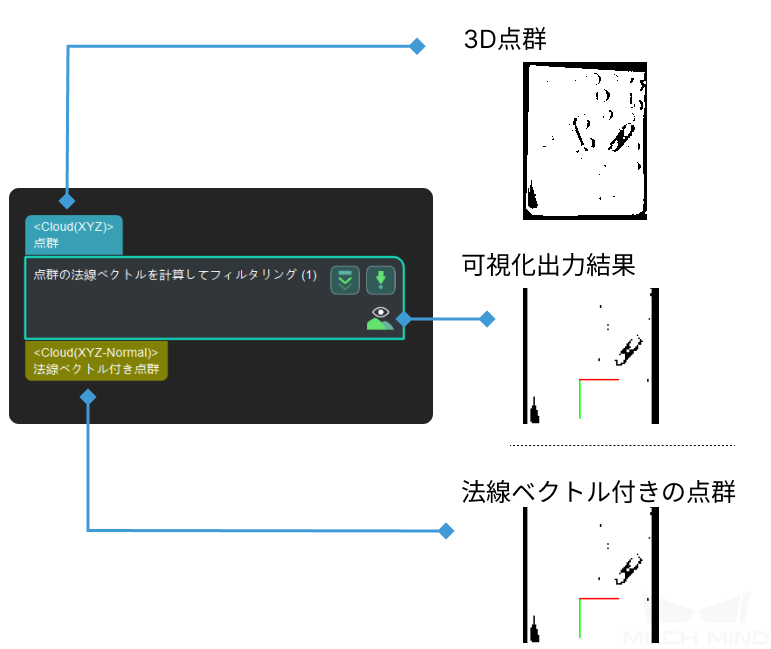
機能のディスクリプション
点群の法線ベクトルを計算し、外れ値を除去します。
使用シーン
元の点群に法線ベクトルを追加し、外れ値を除去します。通常、“カメラから画像を取得”、“深度画像を点群に変換”ステップの後で使用されます。
入力と出力