Extract 3D Points in Cylinder¶
Function
Extract point clouds inside specified cylinders, the point clouds outside the cylinders will be discarded.
Sample Scenario
A general point cloud extraction Step. No fixed usage scenarios.
Input and Output
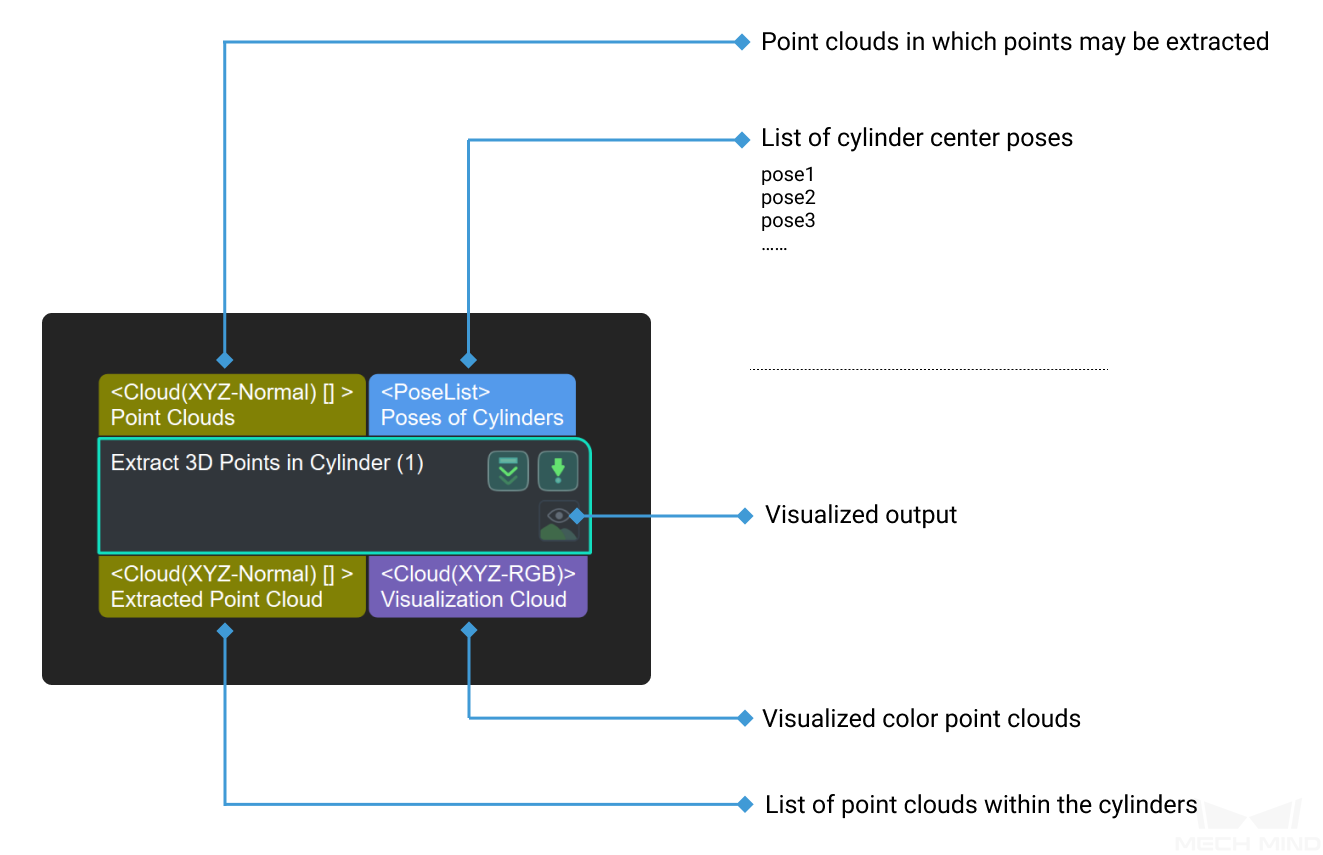
Parameters
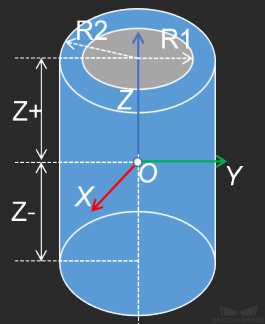
- Shape Type
Z Direction Properties
- Min Z Value
- Max Z Value
Ring and Sector Radius Properties
- Inner Radius
0.- Outer Radius
Sector Angle Properties
The following two parameters appear after choosing
Sectorin Shape Type, and they are used to configure the shape of the sector.
- Start Angle
- End Angle
Usage Settings for Input Clouds
- Check If Object Inside Cylinder by Its Point Center
- Input Point Cloud Usage