点云筛选¶
功能描述
根据设定的规则对点云进行筛选。
使用场景
通常使用点云的点数进行筛选(对应参数“过滤器类型”中的“CloudCapacityFilter”)。 此步骤为旧版,建议使用 验证点云是否符合要求 。
输入与输出
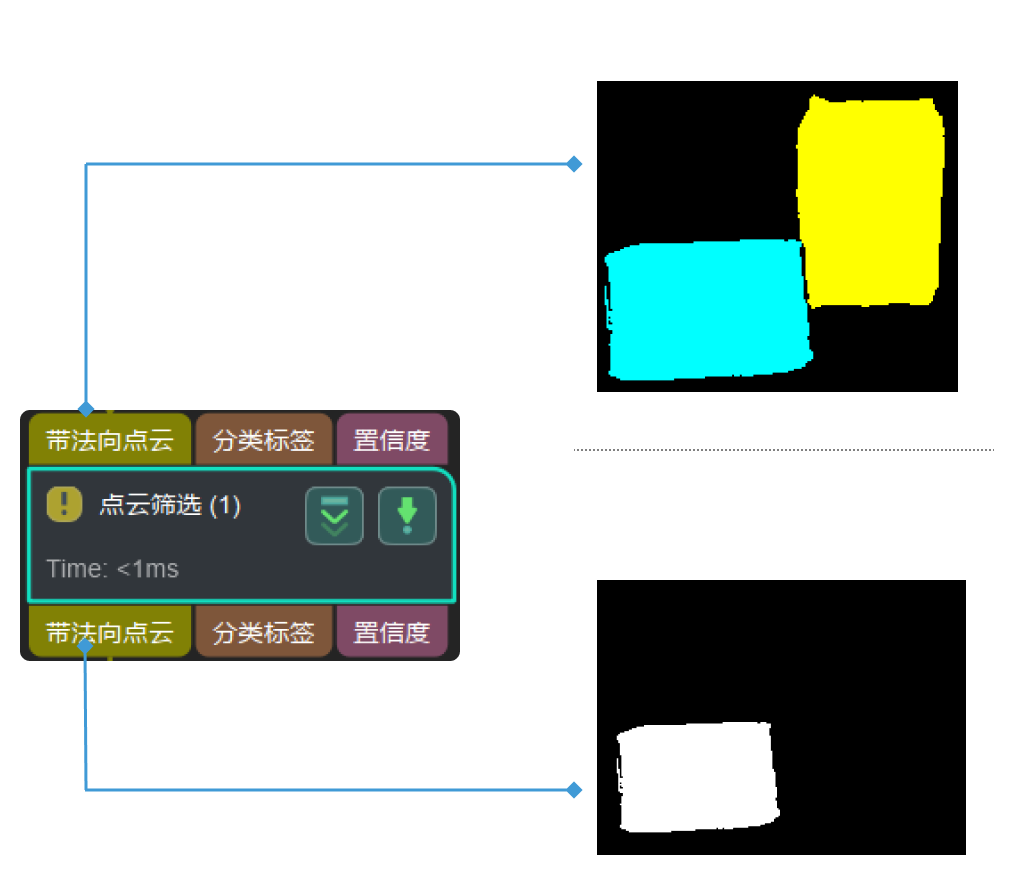
参数说明
滤波类型(_filterType)
调节说明:该参数用于选取滤波类型,共包含三种滤波类型,圆形点云过滤(CircleCloudsFilter),点云容量过滤(CloudCapacityFilter),矩形点云过滤(RecCloudsFilter)以及实心点云过滤(SolidCloudsFilter)。默认值:CircleCloudsFilter建议值:根据实际情况设置。值列表:CircleCloudsFilter, CloudCapacityFilter,RecCloudsFilter,SolidCloudsFilter圆形点云过滤(CircleCloudsFilter)
圆形点云过滤:将3D点云转换到2D掩膜图像上,得到掩膜的外轮廓并计算外轮廓的圆形度和周长,将不在阈值范围内的点云滤除。
轮廓检索模式(contourRetrievalMode)
调节说明:该参数用于选取轮廓检索的模式,共包含两种类型:RETR_EXTERNAL和RETR_HULL。默认值:RECT_EXTERNAL建议值:根据实际检测需求设置。最小面积(minAreaThreashold)
调节说明:圆形点云的最小面积。默认值:100建议值:根据实际情况设置。最大面积(maxAreaThreashold)
调节说明:圆形点云的最大面积。默认值:1000建议值:根据实际情况设置。最小圆度(minCircularity)
调节说明:圆形点云的最小圆度。默认值:0.5建议值:根据实际情况设置。最大圆度(maxCircularity)
调节说明:圆形点云的最大圆度。默认值:1建议值:根据实际情况设置。最小凸度(minConvexity)
调节说明:圆形点云的最小凸度。默认值:0.8建议值:根据实际情况设置。最大凸度(maxConvexity)
调节说明:圆形点云的最大凸度。默认值:1建议值:根据实际情况设置。最小惯量(minInertia)
调节说明:短轴长度与长轴长度的最小比率阈值。默认值:0.6建议值:根据实际情况设置。最大惯量(maxInertia)
调节说明:短轴长度与长轴长度的最大比率阈值。默认值:1建议值:根据实际情况设置。点云容量过滤(CloudCapacityFilter)
点云容量过滤:将点云列表中点个数不在阈值范围内的点云滤除。
最小点数目(minPointsNum)
调节说明:最小点数阈值默认值:6000建议值:根据实际情况设置有效范围:(0,maxPointsNum)最大点数目(maxPointsNum)
调节说明:最大点数阈值默认值:360000建议值:根据实际情况设置有效范围:(minPointsNum,∞)矩形点云过滤(RecCloudsFilter)
minRectangularity
调节说明:该参数用于调整最小矩形度的大小。矩形度等于点云的实际面积与最小外接矩形的面积之比。默认值:0.9000建议值:根据实际情况设置实心点云过滤(SolidCloudsFilter)
ratio
调节说明:该参数是点云与被填充实体之间的大小的比值的最小值。默认值:0.9建议值:根据实际情况设置有效范围:(0,1]removeSolidCloud
调节说明:该参数用于决定是否移除实心点云,设置为True时,移除实心点云,反之移除空心点云。默认值:True建议值:根据实际情况设置值列表:True, False膨胀尺寸(dilateSize)
调节说明:该参数用于调节膨胀操作结构元尺寸。滤波类型(filterType)为“圆形点云过滤(CircleCloudsFilter)”或者“点云容量过滤(CloudCapacityFilter)”有效。默认值:3建议值:3, 5, 7有效范围:[1,∞)腐蚀尺寸(erodeSize)
调节说明:该参数用于调节腐蚀操作结构元尺寸。滤波类型(filterType)为“圆形点云过滤(CircleCloudsFilter)”或者“点云容量过滤(CloudCapacityFilter)”有效。默认值:3建议值:3, 5, 7有效范围:[1,∞)