点云形状检测器¶
功能描述
检测平面或圆柱形状的点云并输出,所需形状可在参数中选择。
使用场景
通常用于检测具有平面和圆柱形状物体。
若需计算圆柱体点云的抓取点,此步骤后续可连接步骤 计算圆柱抓取点 或 根据偏移量调整位姿 。
输入与输出
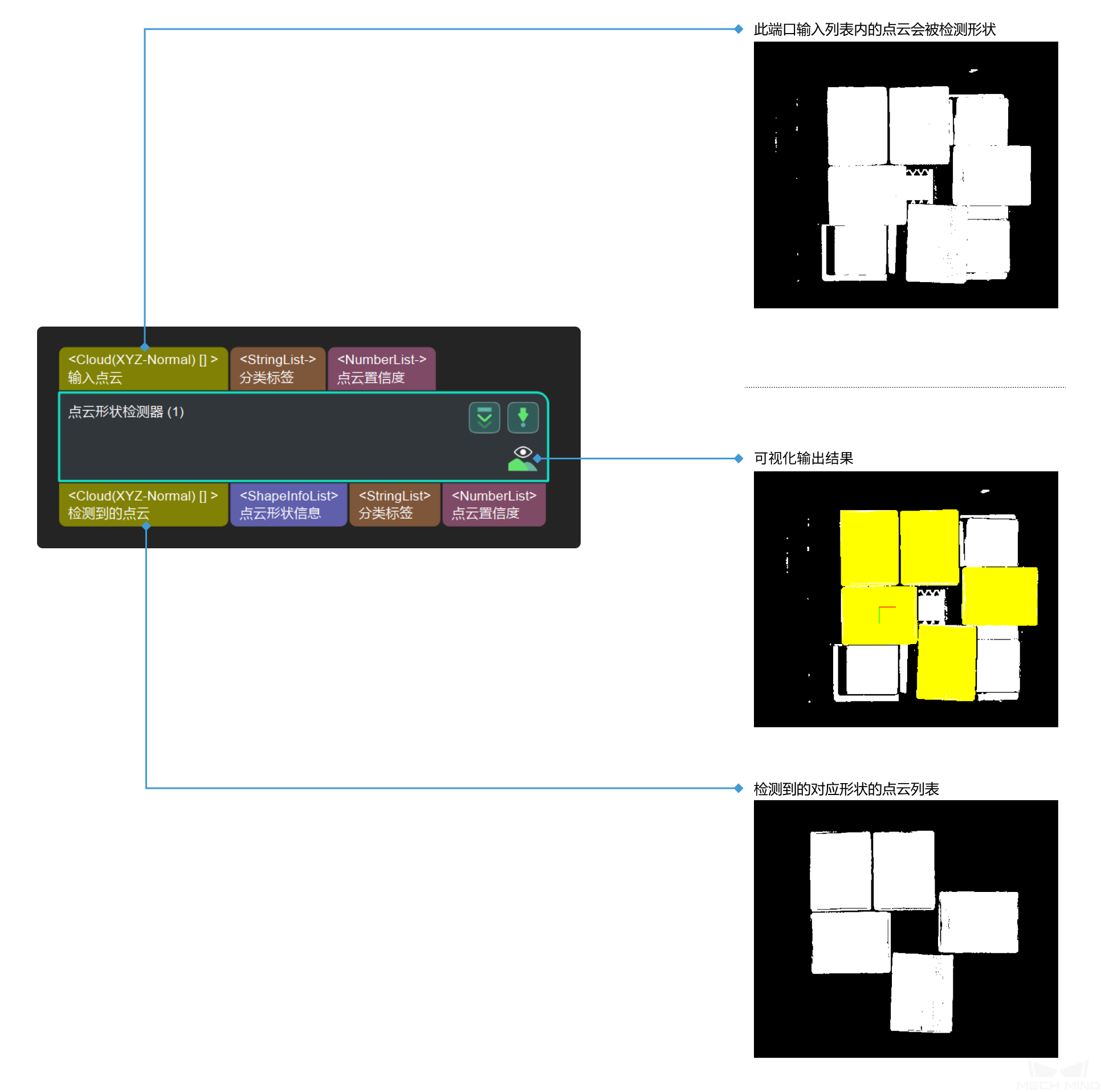
参数说明
形状类型(Shape Type)
调节说明:该参数用于选取检测的目标形状类型,一共三个选项,分别为平面(plane)、圆柱(cylinder)和球体(sphere)。默认值:平面(plane)建议值:根据实际情况而定。检测参数(Detection Property)
检测算法(detector)
调节说明:该参数用于选取检测过程中用到的算法,包含两个算法,分别为ALGO1和ALGO2。(后期会进行优化,仅ALGO1算法存在)默认值:ALGO1。建议值:ALGO1。法向偏差最大阈值(normalDeviation)
调节说明:该参数代表实际图像中的点的法向与投影过后的理论上相应的标准形状上的点对应的法向之间角度偏差的上限,单位为°,给出了实际法向与理论法向之间误差的范围的上限。默认值:30.0000。建议值:根据实际情况设置。点云波动误差(epsilon)
调节说明:该参数限定了点云波动误差的可接受范围。默认值:0.0050。建议值:[0.0030,0.0050]。聚类最小间隔(clusterEpsilon)
调节说明:用于调节点云连通性判断的最小间隔。当该值调大时,距离较远的点也会被分为同一类;当该值调小时,距离较近的点依旧会被分成不同类。默认值:0.0050。建议值:根据实际情况设置。点云量化分辨率(cloudResolution)
调节说明:该参数用于控制点数目以及密集程度。当该参数调大时,点云更加密集,计算精度提高但是计算时间变长;当该参数调小时,点云比较稀疏,计算精度可能会下降但是节省计算时间。默认值:0.0050。建议值:在同时保证计算效果和时间长短的情况下,最好取“聚类最小间隔(clusterEpsilon)”的两倍。输出结果个数(candidateTopNum)
调节说明:该参数用于控制每个输入的点云最终输出的结果的个数。默认值:1。建议值:根据实际情况设置。是否根据点云个数排序(sortBySize)
调节说明:该参数用于决定是否根据点云的个数进行排序。默认值:True。建议值:根据实际情况设置。检测成功率(successProbability)
调节说明:该参数用于调节检测成功率的大小,确保有足够的成功率能够检测到对应的形状。默认值:0.9900建议值:根据实际情况设置。候选点过滤器(Candidates Filter)
最小覆盖比例(minCoverageRatio)
调节说明:检测的得到的具有形状的点的数目,占所有检测到的具有形状的点的总数的比例。低于该参数设定值的相应的形状的点会被过滤掉。默认值:0.1000。建议值:根据实际情况设置。最小平均距离误差(minMeanDistError)
调节说明:实际的点与相应的检测得到的理论形状模型中的点之间的平均距离误差,单位为m。当该值调大时,误差较大的点云不会被过滤掉;当该值调小时,误差较小的点云依旧会被过滤掉。默认值:0.0100。建议值:根据实际情况设置。最小平均角度偏差(minMeanAmgleError)
调节说明:实际的点与相应的检测得到的理论形状模型中的点之间的平均角度误差,单位为°。当该值调大时,误差较大的点云不会被过滤掉;当该值调小时,误差较小的电云依旧会被过滤掉。默认值:45.0000。建议值:根据实际情况设置。圆柱参数(Cylinder Property)
圆柱最小半径(minRadius)
调节说明:该参数用于设置圆柱半径的最小值,单位为m,半径低于该值的圆柱将会被过滤掉。默认值:0.0100。建议值:根据实际情况设置。圆柱最大半径(MaxRadius)
调节说明:该参数用于设置圆柱半径的最大值,单位为m,半径高于该值的圆柱将会被过滤掉。默认值:0.1000。建议值:根据实际情况设置。是否优化圆柱面形状参数(ifOptimizeCylinderCoefficients)
调节说明:该参数决定了是否优化圆柱面的形状参数(中心点和轴线)。默认值:False。建议值:True.