3D 工件识别可视化配置工具¶
本文介绍“3D 工件识别可视化配置工具”的使用方法。
功能简介¶
3D 工件识别可视化配置工具聚合了视觉处理通用功能。只需经过以下三个步骤,即可快速完成“3D 工件识别”的配置。

选择工件: 从 匹配模板与抓取点编辑器 中制作工件点云模板,并选择待识别工件。
预处理: 设置有效的识别区,可将干扰因素屏蔽在区域外,算法将对识别区内点云做基本处理,以提升识别效率。
识别工件: 以可视化方式调试 3D 匹配参数,使其满足业务精度和节拍要求,必要时可借助深度学习辅助处理。
使用流程¶
该工具具体使用流程如下。
选择工件¶
首先单击 选择工件 ,弹出工件库。
单击 模板编辑器 ,打开匹配模板与抓取点编辑器。可参考 匹配模板与抓取点编辑器 章节创建待抓取工件的匹配模板,然后关闭工具。
在工件库中,勾选待抓取工件的点云模板,然后选择匹配模式,最后单击 下一步 进入“预处理”流程。
注解
工件库中只显示符合要求的工件点云模板,
对工件点云模板的要求是:工件点云模板至少设置了一个抓取点(该抓取点也可作为几何中心点)。
预处理¶
单击 设置 ,在 ROI 设置界面中 设置 3D ROI 。
3D ROI 设置完成后,单击 保存并使用 。
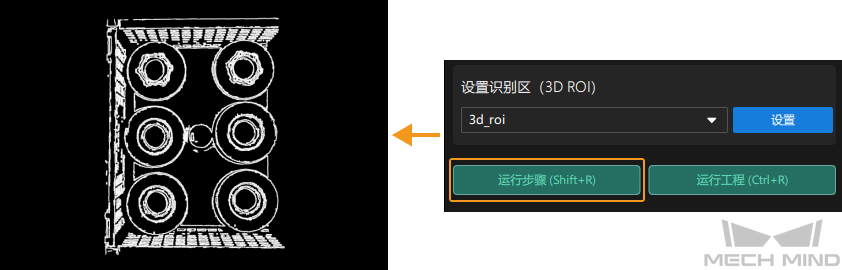
单击 运行步骤 后,在该工具左侧查看预处理结果。
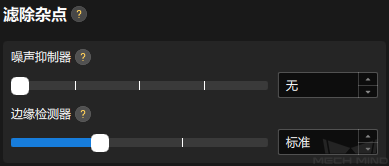
设置边缘检测器和噪声抑制器参数,滤除杂点 (仅边缘匹配模式下存在该参数)。
提示
如需查看预处理后的 2D 图像和 3D 图像,可在该工具界面顶部切换相关选项。
预处理完成后,单击 下一步 进入“识别工件”流程。
识别工件¶
该流程操作步骤如下:
1.设置 3D 匹配、结果判定相关参数。关于参数的解释和调节建议,请参考 参数说明 。
2.(可选)如果需要深度学习辅助处理,可从 深度学习辅助 下拉列表中选择 CPU 或 GPU,然后点击模型包管理工具按钮。
3.在深度学习模型包管理工具界面,导入使用的深度学习模型后关闭工具,并从下拉列表中选择导入的模型包并调整参数深度学习置信度阈值。
4.单击 运行步骤 后,在该工具左侧查看 3D 匹配识别结果。
5.识别精度和节拍满足项目需求后,单击 完成 ,“3D 工件识别可视化配置工具”将会自动关闭。或单击 下一个工件 ,开始下一工件的识别。
参数说明¶
3D 匹配
- 运行方式
- 参数解释:该参数用于指定工件识别过程中的识别精确度和性能。值列表:高速度、标准、高精度、超高精度。
高速度:建议用于单个工件独立码放或少量工件有序码放的场景。
标准:适用于大多数工件上下料场景,是速度与精确度之间的折衷策略。
高精度:建议用于工件数量多或工件乱序堆叠码放的场景。
超高精度:建议用于需要高精度定位的场景。
默认值:标准。调节建议:需根据业务对于识别精确度和性能的要求,调节该参数。 - 偏差矫正能力
- 参数解释:该参数用于指定纠正偏差的等级。等级越大,越能将存在偏差的位姿纠正为精确的位姿,但过大将导致精度损失。值列表:小、中、大。
小:适用于大多数情况。
中:视情况选择。
大:视情况选择。
默认值:小。调节建议:当匹配结果与实际目标物体出现较大位置偏离时,需调整该参数。 - 对称性设置
- 参数解释:当待识别工件具有局部对称性时,为了避免匹配结果陷入局部最优,可增加对称性设置,从而筛选出更优的匹配结果。调节说明:相关参数的调节说明如下。
对称性旋转轴:选择工件几何中心的一个轴作为旋转轴。
对称性角度步长:若工件绕旋转轴旋转 60° 前后看起来一样,则该参数可设定为 60°。
最小旋转角:工件可绕对称性旋转轴旋转的最小角度。
最大旋转角:工件可绕对称性旋转轴旋转的最大角度。
- 位姿过滤设置
- 参数解释:当识别结果中存在异常位姿朝向,可增加位姿过滤设置,从而排除异常识别结果。边缘匹配模式下推荐使用。调节说明:根据模板翻转角度过滤位姿:边缘匹配模式下,当模板点云匹配至场景点云时,根据模板翻转角度过滤位姿。当模板翻转角度超过 角度差值上限阈值 时,该位姿将被过滤。
结果判定
- 3D 匹配置信度阈值
- 参数解释:该参数用于设置 3D 匹配识别结果的置信度阈值。当 3D 匹配识别结果的置信度分数大于该值时,则认为该结果有效。该值越大,结果越准确。默认值:0.300调节建议:需根据实际需求调整该参数。
- 输出个数上限
- 参数解释:该参数用于设置能够输出的 3D 匹配识别结果个数上限。若有多个 3D 匹配识别结果,则会根据 3D 匹配识别结果的置信度分数对 3D 匹配识别结果进行降序排序,然后根据设定的 输出个数上限 来输出置信度分数高的 3D 匹配识别结果。默认值:1调节建议:当识别结果较多,或业务对结果数量有明确的上限要求时,需调整该参数。
提示
获得的工件抓取点,仅显示既是几何中心点,又是抓取点的点。
实际的 3D 匹配识别结果输出个数不一定与设置的 输出个数上限 一致。例如设置的 输出个数上限 为 5,实际一共只有 3 个 3D 匹配识别结果,则最后输出的 3D 匹配识别结果个数为 3。