路径规划¶
功能描述¶
使用输入的视觉点规划机器人路径,输出规划成功的机器人路径。
注意
使用该步骤前先完成 机器人与通信配置 。
使用标准接口通信方式时,需使用 101 指令启动 Mech-Vision 工程,发送的指令参数具体为: 101, Mech-Vision 工程编号, 预期视觉点数量, 机器人位姿类型, 机器人位姿 。
使用场景¶
该步骤一般在通信方式为标准接口或 Adapter,只需规划在视觉目标附近的机器人运动路径的项目中使用。 通过建立场景、传入视觉点和点云进行碰撞检测和路径规划并最终输出无碰撞的机器人路径。
该步骤一般的前接和后接步骤如下:
前接步骤:位姿调整和位姿处理相关的步骤。
后接步骤:“输出”步骤(“端口类型”参数设置为“预定义(机器人路径)”)。
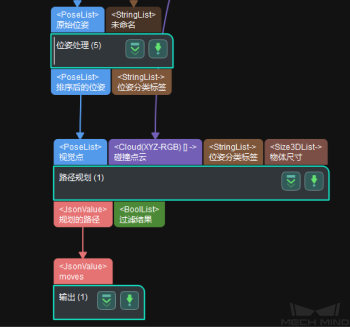
输入与输出¶
- 输入
视觉点:此端口输入的位姿将会被用来规划机器人路径。
碰撞点云:此端口输入的点云用于进行与末端工具的碰撞检测。
位姿分类标签:此端口为各视觉点对应的物体标签。
物体尺寸:此端口为各视觉点对应的物体尺寸。
- 输出
规划的路径:规划完毕的机器人路径。
过滤结果: 视觉点的过滤结果列表,True 表示对应视觉点符合要求,False 表示不符合要求。