Cloud Processing (GPU)¶
Function¶
Concatenate the two pose lists to merge them into one.
Usage Scenario¶
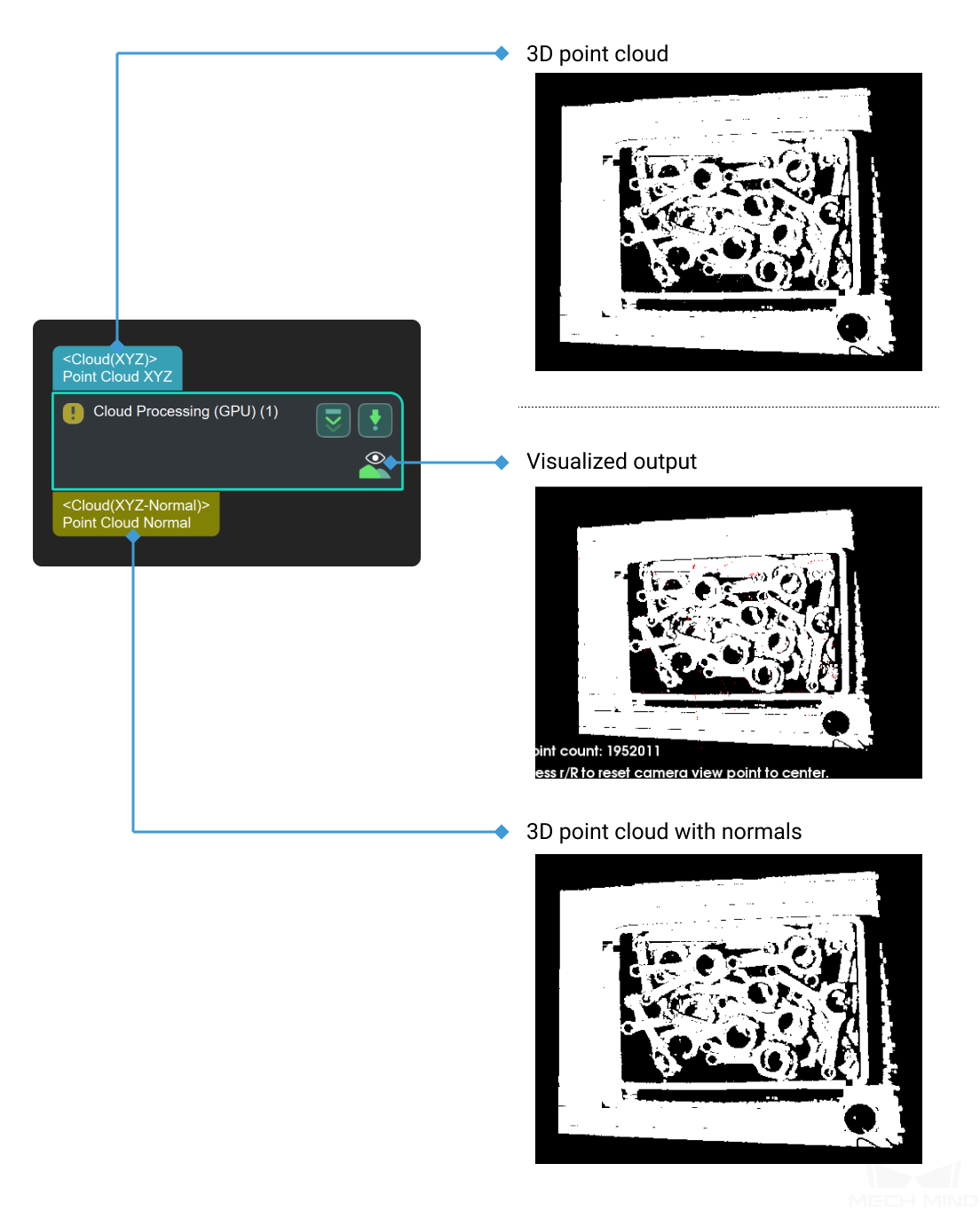
Add normals to the input point cloud and remove outliers. Usually used after Capture Images from Camera, From Depth Map to Point Cloud. This Step belongs to an earlier version. Please instead use Calc Normals of Point Cloud and Filter It.
Input and Output¶