ロード手順¶
本節では、VizによりKawasakiロボットをティーチングする方法について説明します。主に次の手順が含まれます。
コントローラとソフトウェアのバージョンを確認¶
コントローラ:Eシリーズ/Fシリーズ。
ネットワーク接続を確立¶
ハードウェアの接続¶
LANケーブルでコントローラのLANポートと産業用コンピュータのLANポートを接続します。
コントローラのCPUボードに二つのLANポートがあり、それらのIPを別々に設定する必要があります。

IP設定¶
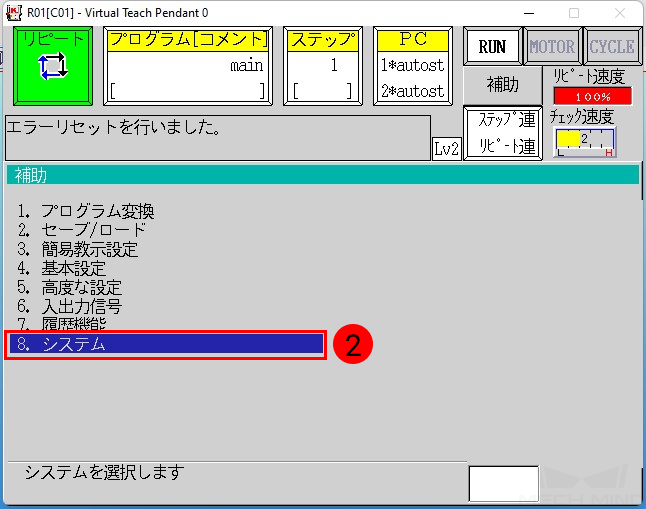
ロボットLANポートのIPを設定するには、まず、ティーチペンダントの 補助 をクリックします。そして をクリックします。


ポート1画面でロボットのネットワークポート1のIPとサブネットマスクを設定します(ロボットIPと産業用コンピュータIPを同じネットワークセグメントに設定する必要があります)。ゲートウェイを使用すれば、ゲートウェイIPの設定も必要があります。
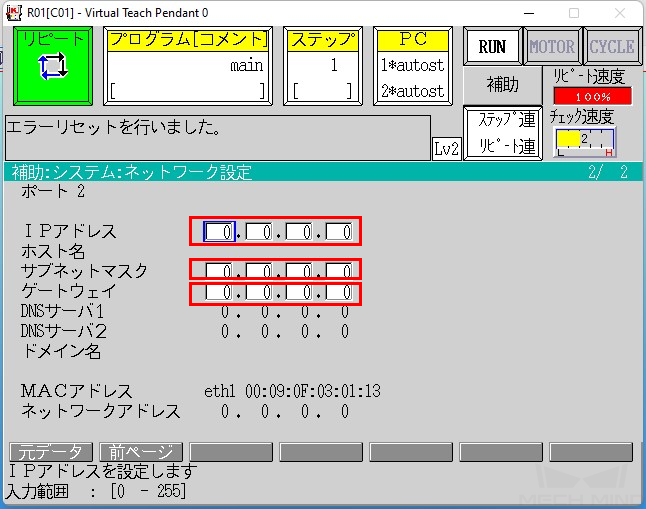
IP設定が完了後、ティーチペンダントの 登録 をクリックしてコントローラを再起動します。
ファイルをロボットにロード¶
ロードするファイルを選択¶
ファイルはMech-Centerのインストールフォルダー( XXXX/Mech-Center-xxx/Robot_Server/Robot_FullControl/kawasaki )にあります。
mm_control.as ファイルをUSBメモリのルートディレクトリにコピーしてからUSBメモリをコントローラに挿入します。
事前準備¶
ユーザーのプログラムを保存
ヒント
ティーチペンダントにユーザーのプログラムがある場合、ロードを実行する前にそれをバックアップしてください。
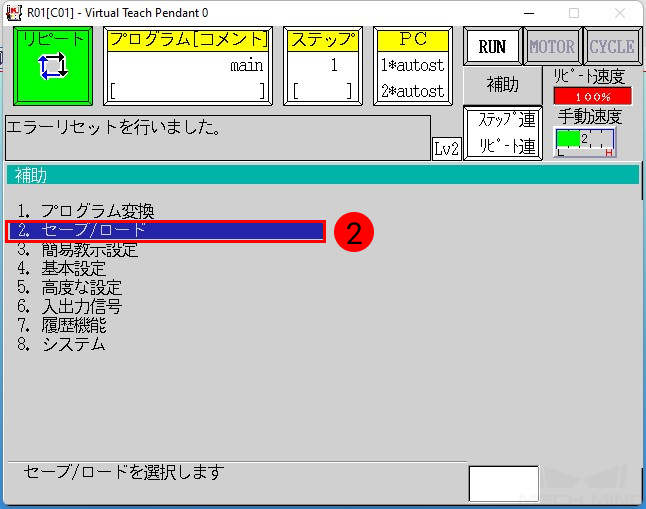
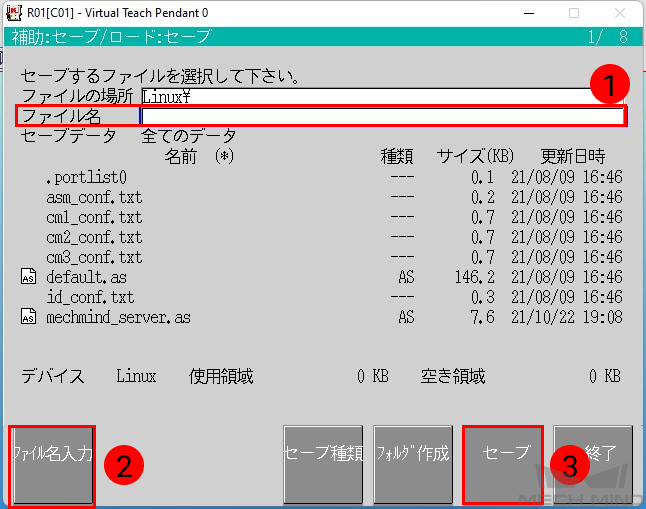
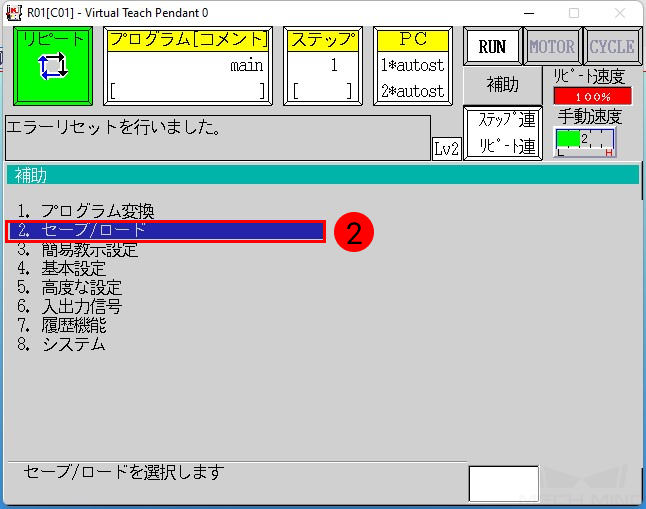
補助 をクリックして、 をクリックします。

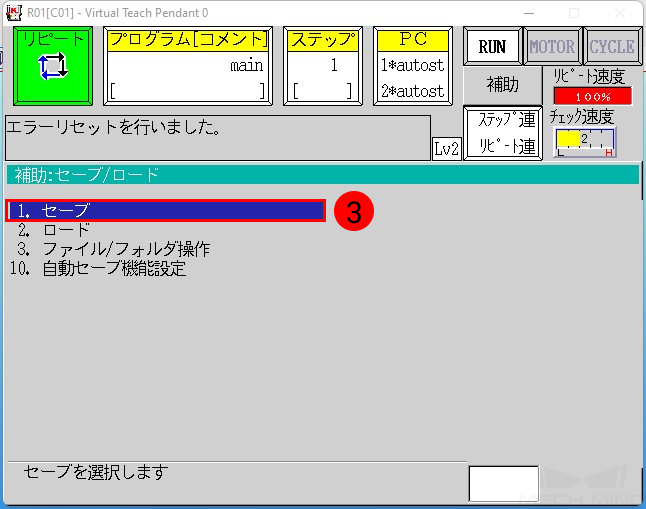
保存画面でファイル名をクリックします。それで ファイル名入力 をクリックして入力してから セーブ をクリックします。保存したらティーチペンダントの R をクリックしてメインインターフェイスに戻ります。
ロボットのフォアグラウンドプログラムとPCプログラムを終了
注意
ロードを正常に実行するために、ロボットのフォアグラウンドプログラムとPCプログラムを終了してください。
ロードを実行する前に、ティーチペンダントのプログラムウィンドウとPCウィンドウでは何のプログラムにも登録していないことを確認してください。プログラムに登録している場合にそれを登録解除してください。

フォアグラウンドプログラムをログアウトするとき、プログラムのウィンドウをクリックしてから 登録解除 をクリックします。

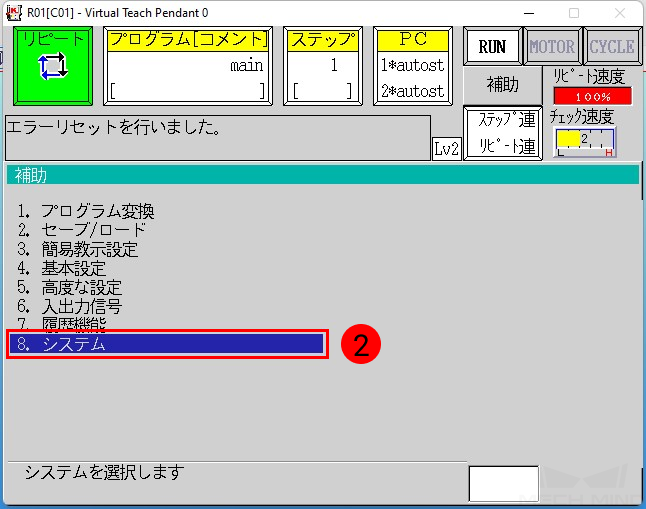
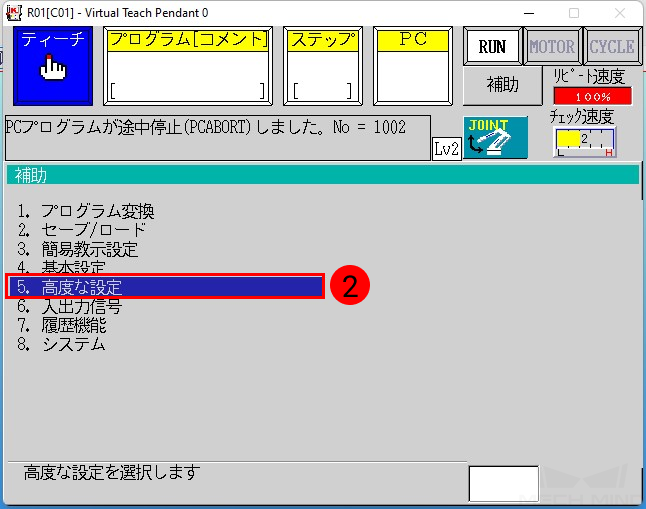
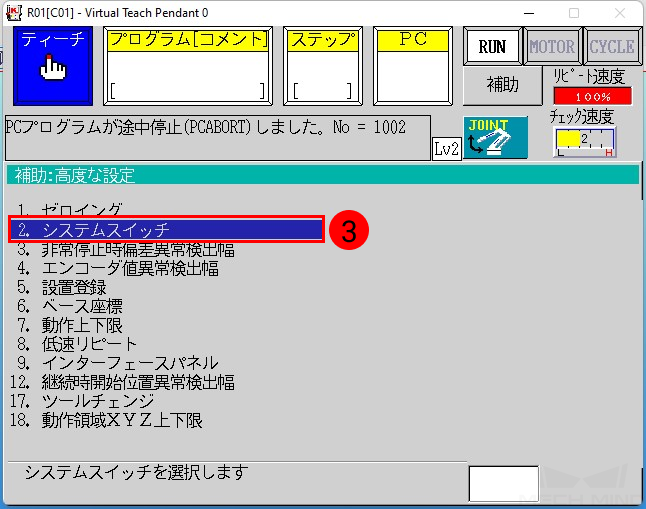
PCプログラムをログアウトするとき、ティーチペンダントで 補助 をクリックしてから をクリックします。

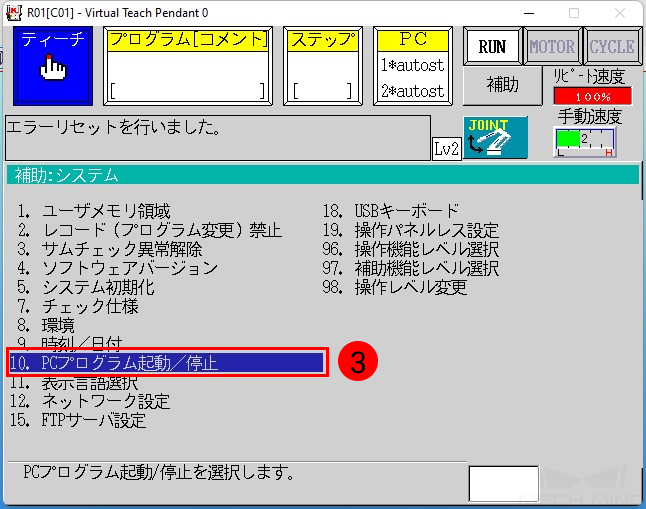
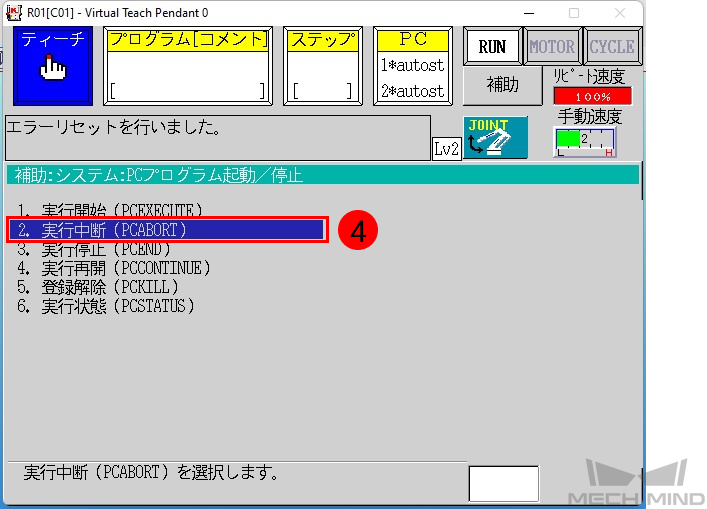
登録 をクリックしてPCプログラム1を停止し、PCプログラム番号を2に変更します。それで 登録 をクリックしてPCプログラム2を中断してから R をクリックして戻ります。

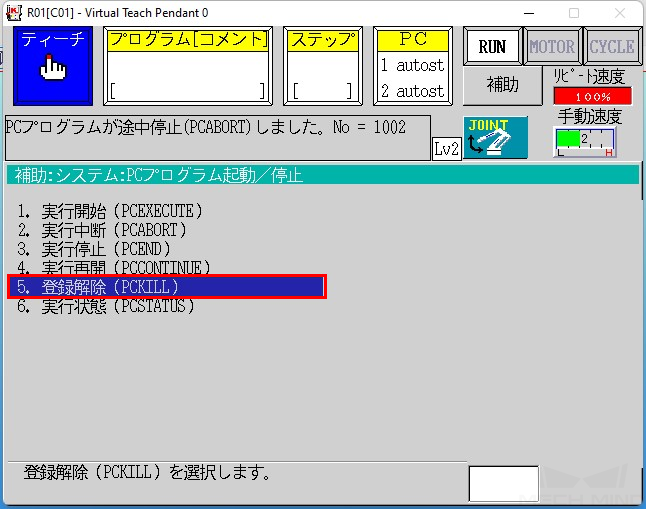
5. 登録解除 を選択してから 登録 をクリックしてPCプログラム1をログアウトしてPCプログラム番号を2に変更します。それで 登録 をクリックしてPCプログラム2を登録解除してから R をクリックして戻ります。

下図に示すように、ロードを実行する前にロボットがティーチモードであること、またプログラムウィンドウとPCウィンドウにプログラムがないことを確認してください。

注意
PCウィンドウにプログラムがあるかをチェックします。もしあれば、PCウィンドウにプログラムがなくなるまで以上の操作を繰り返してください。
ロードを実行¶
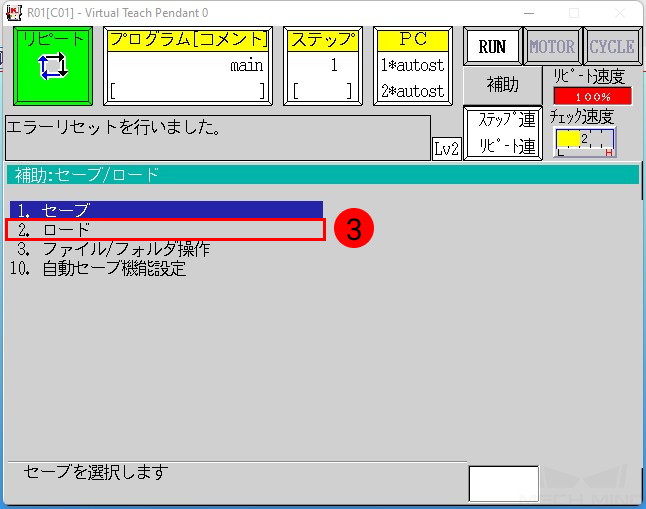
プログラムが保存されたUSBメモリをコントローラに挿入します。ティーチペンダントで 補助 をクリックします。 を選択します。プログラムファイル mm_control.as をダブルクリックして mm_control.as をファイル名に表示します。そして ロード をクリックします。

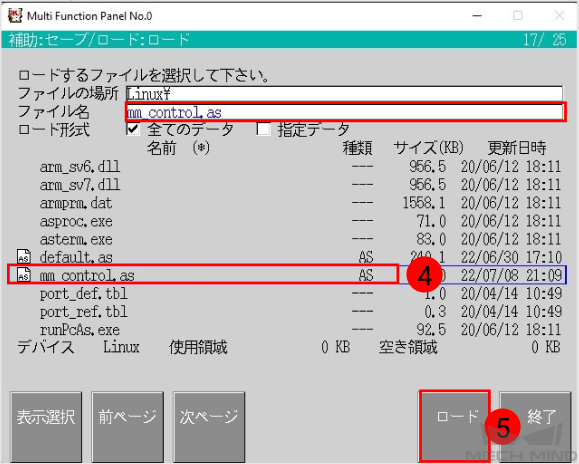
ファイルをロードして確認した後、ティーチペンダント R をクリックして終了します。

ロード後の操作¶
PC起動時のプログラム自動起動を設定
ロボットのロード完了後に、下記の通りにPC起動時のプログラム自動起動を設定します。
ティーチペンダントの 補助 をクリックして を選択します。 次へ をクリックしてAUTOSTART.PCとAUTOSTART2.PCの On にチェックを入れてから保存します。


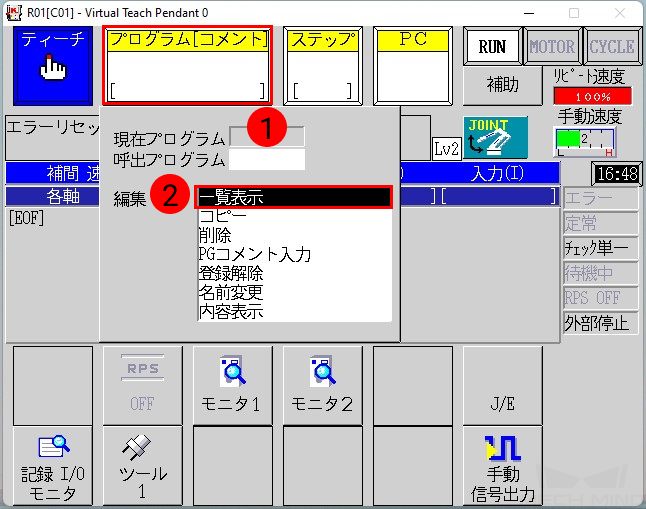
フォアグラウンドプログラムを選択
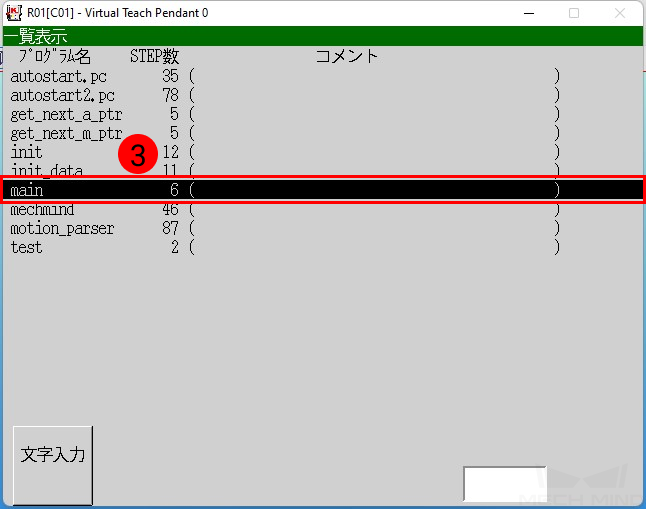
プログラムウィンドウをクリックして 一覧表示 をクリックして main を選択します。ティーチペンダントで 登録 をクリックして確認します。PCプログラムウィンドウにほかのプログラムがないことを確認してください。
リピートモードへの切替
コントローラの ティーチ/リピート スイッチをリピートモードに回して、ティーチペンダのスイッチを切って リピートモード にします。

タッチパネルでプログラムの実行モードを 連続ステップ、リピート連続 に切り替えます。

コントローラを再起動
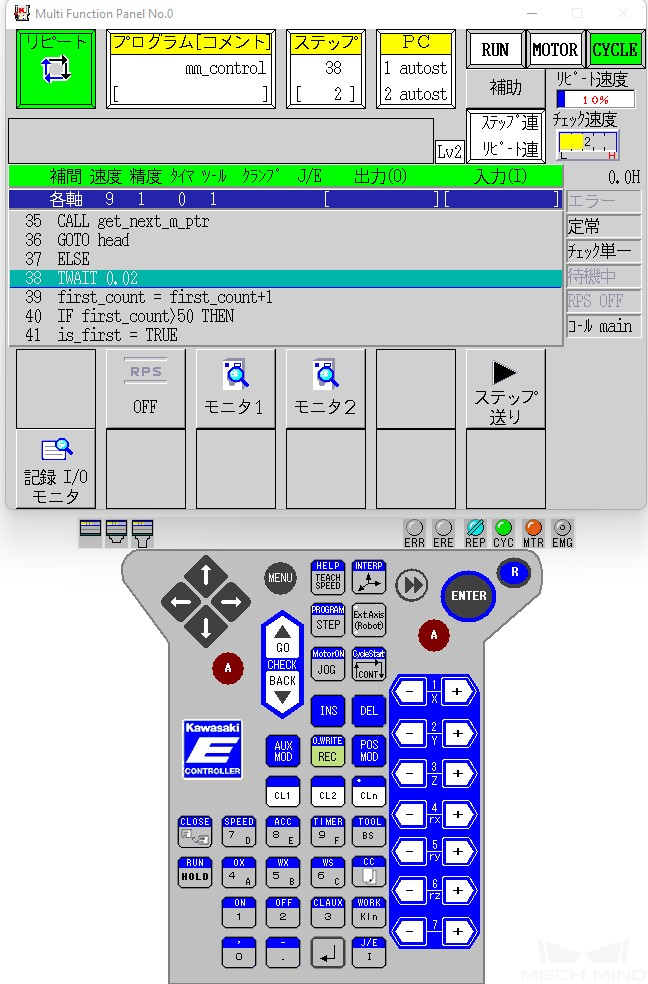
コントローラを再起動して下図の画面になります。PCプログラムにウィンドウ「*」は、実行中のプログラムです。実行ステップは1でなければ、手動で変更してください(ステップのウインドウをクリックして1を入力します)。

ロボットの接続状態をテスト¶
Mech-Center設定をチェックしてロボットに接続¶
詳しくは、 ロボットの接続状態をテスト をご参照ください。
ヒント
KawasakiロボットとMech-Centerとの通信は二つのPCプログラムによって実行されます。二つのPCプログラム実行中に、フロントメインプログラムを実行せずにMech-Centerに接続することができます。
ロボットを起動¶
A を押したままタッチパネルで MOTOR をクリックします。
A を押したままタッチパネルで CYCLE をクリックしてロボットを起動します。
この時、 RUN は点灯しなければ、A を押したままタッチパネルの 一時停止/実行 キーを押します。
注意
RUN 、 MOTOR 、 CYCLE は全部点灯したら、ロボットプログラムが正常に実行することになります。
ロボットのリピート速度を10%に調整します。異常な運動が発生したら非常時停止ボタンを押してください。