ロボット構造のタイプ¶
軸数 |
6 軸 |
6 軸 |
|||
構造 |
構造名 |
UR_UR5_Like |
SphericalWrist_SixAxis |
||
説明 |
6 軸協働ロボット |
一般的な産業用 6 軸ロボット |
|||
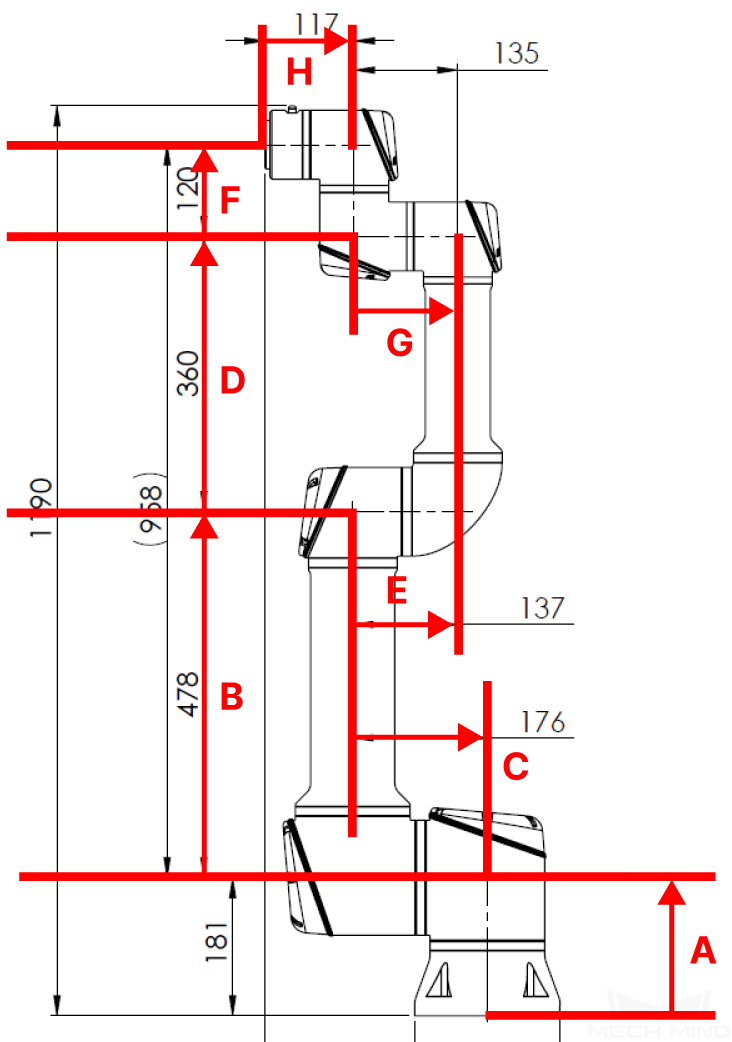
ロボット構造図 |
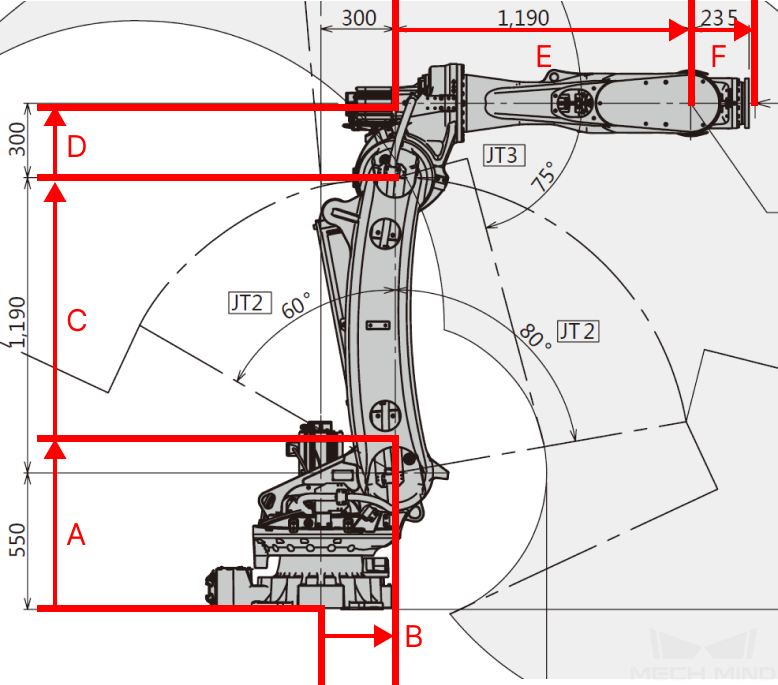
DH パラメータ図 |
|
|
||
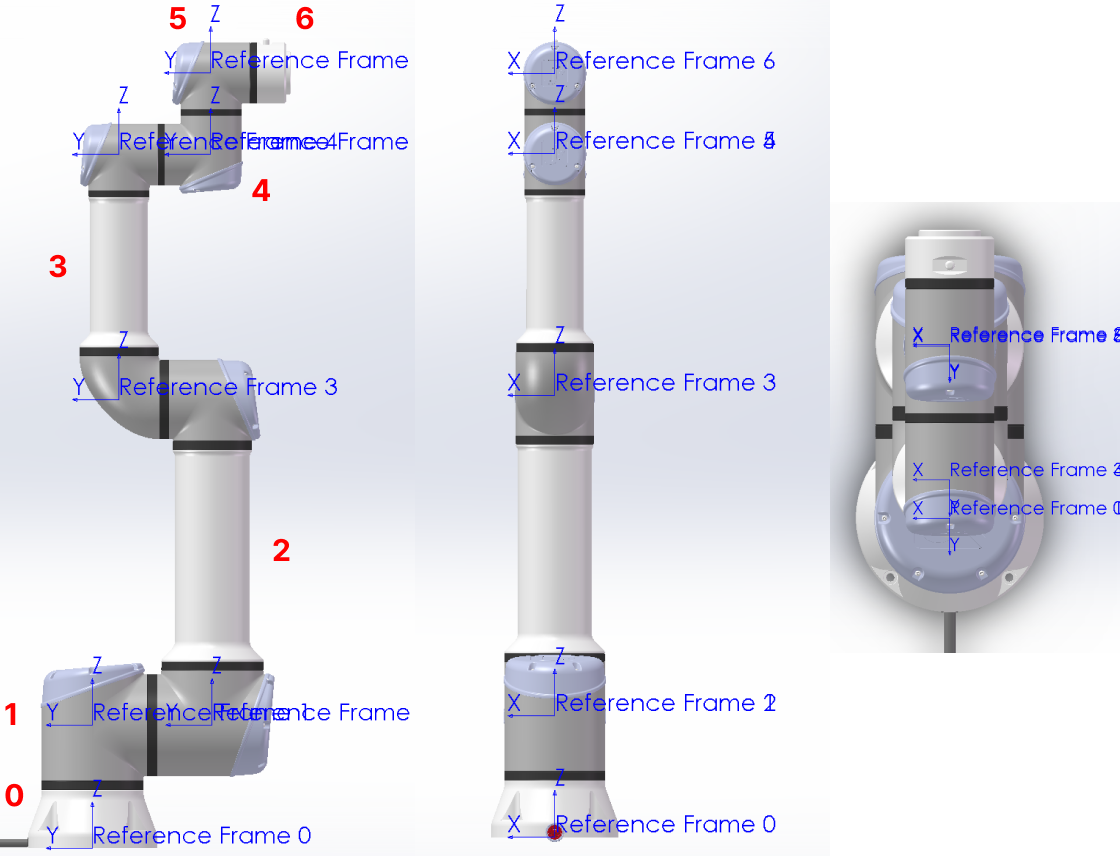
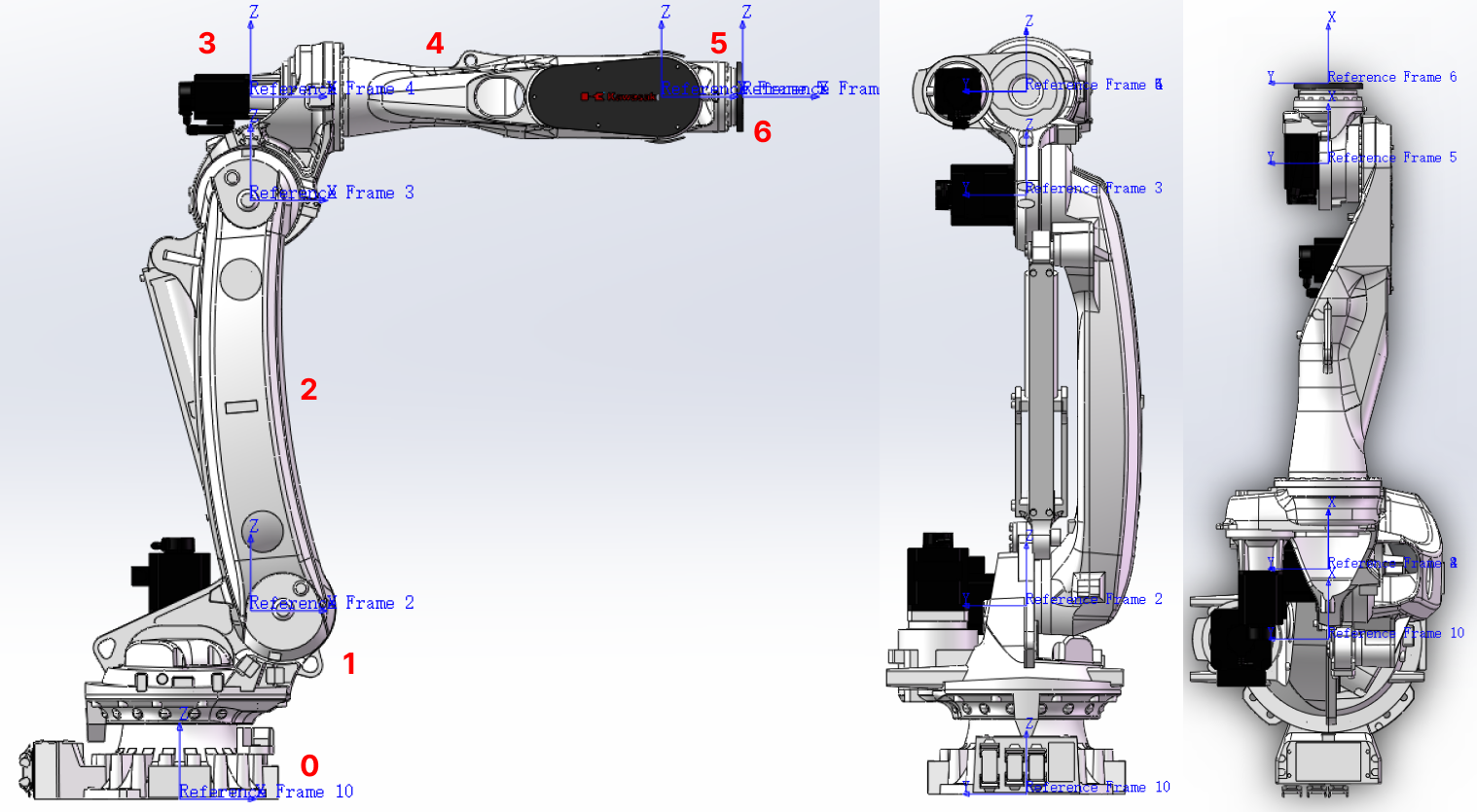
座標系 各軸名 |
|
|
|||
リンク、座標系、対応関係 |
0:座標系10、 1:座標系10、 2:座標系2、 3:座標系3 |
4:座標系4; 5:座標系5; 6:座標系6 |
0:座標系10、 1:座標系10、 2:座標系2、 3:座標系3 |
4:座標系4; 5:座標系5; 6:座標系6 |
|
[robot]_algo の例 |
{
"algo_type": "UR_UR5_Like",
"robot_type": "UR_16E",
"dh": [ A, B, D, G, F, H ],
"shoulder_offset": C,
"elbow_offset": E,
"min_limits": [ J1 min, J2 min, J3 min, J4 min, J5 min, J6 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max, J5 max, J6 max ],
"mastering_joints": [ J1, J2, J3, J4, J5, J6 ], # Unnecessary
"axis_flip": "J1J2J3J4J5J6" # Unnecessary
}
|
{
"algo_type": "SphericalWrist_SixAxis",
"robot_type": "KAWASAKI_CX110L",
"dh": [ A, B, C, D, E, F ],
"min_limits": [ J1 min, J2 min, J3 min, J4 min, J5 min, J6 min ],
"max_limits": [ J1 max, J2 max, J3 max, J4 max, J5 max, J6 max ],
"mastering_joints": [ J1, J2, J3, J4, J5, J6 ], # Unnecessary
"axis_flip": "J1J2J3J4J5J6" # Unnecessary
}
|
|||