計画履歴¶
計画履歴の使用について紹介します。以下の内容について説明します。
概要¶
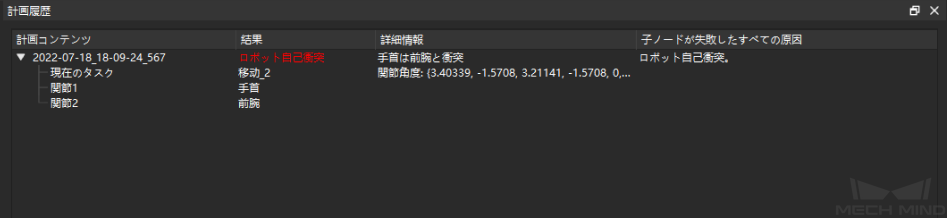
計画履歴の結果の構造はツリー構造であり、Mech-Viz の計画プロセスが詳細かつ完全に記録されます。
ログに比べて、計画履歴では、計画の各ノード(特に失敗したノード)をより詳細に表示できます。
一部のエラーはシリアルエラーです。1つの子ノードが計画に失敗した場合、全体的な計画は失敗します。例えば、ある関節角度が正しく設定されていない場合、ロボットは計画された位置に到達できません。
並列エラーもあります。1つの子ノードのみが正常に計画されている場合、全体的な計画は成功します。例えば、Mech-Vision によって計算された把持点には、ノードのいずれかが正常に実行された場合、それは、把持位置姿勢で対象物を把持できることを意味します。
ヒント
プロジェクトを実行する過程で、失敗したノードに特に注意を払う必要があります。
衝突結果の可視化¶
衝突接触の計算と記録¶
衝突接触の計算と記録は普通、衝突結果の可視化のために使用されます。
計算設定 の 各解に対応する完全な衝突接触を計算 + 計画履歴に保存 を使用して衝突接触を記録して計画履歴に保存することができます。
計画履歴の衝突結果のグラフィックスなプロンプト¶
メニューバーの ディスプレイ をクリックして、 計画中に衝突を表示 にチェックを入れます(デフォルトではチェックが入っています)。
シーンとの衝突
衝突が発生したステップの名前をクリックして、衝突したすべての対象物がハイライト表示されます。
衝突した対象物をクリックして、それがハイライト表示されます。
点群との衝突
衝突が発生したステップの名前をクリックすると、衝突したすべての対象物がハイライト表示されます。
衝突体積 をクリックして、衝突した点群がハイライト表示されます。
点群と衝突したときに、 衝突接触を記録 しないと、別の衝突する対象物のみがハイライト表示されます。
把持対象物との衝突
把持対象物と衝突が発生した場合、それがハイライト表示されます。
よく発生する失敗と解決策¶
シーンの物体との衝突¶

問題:ロボットハンドとシーン[1]の衝突が発生しました。
解決法:衝突が発生したシーンの物体の位置をチェックします。それが変わっていない場合に現在のステップの相応の位置姿勢を調整します。

衝突体積がしきい値超過¶

問題:ロボットハンドと点群の衝突体積が指定したしきい値を超えました。
解決法:検出した衝突体積と現場の状況に応じて、衝突体積のしきい値を変更します。あるいは TCP 、把持点、ロボットハンド衝突モデルの位置姿勢を調整します。