基本概念¶
プロジェクト¶
Mech-Viz で作成するロボット経路計画プロジェクトです。Mech-Viz でプロジェクトに必要な設定を完了したら、このプロジェクトを使用してロボット経路を計画してロボットの動作を制御することができます。プロジェクトの設定は、プロジェクトと同名のフォルダに保存されます。
リソース¶
プロジェクトを構成するリソースです。ロボット、ロボットハンド、対象物、シーンの物体などがあります。
- ロボット
Mech-Viz では、「ロボット」とは産業用の多関節ロボットまたはトラスロボットのことです。
- ロボットハンド
ロボットに作業を実行させるためにフランジに取り付ける装置です。グリッパや吸盤などがあります。
- 対象物
ロボットハンドが作用する物体です。段ボール箱や金属部品、接着剤塗布または溶接を実行する部品などがあります。
- シーンの物体
ロボット実機が動作する空間にある物体です。ロボットの安全柵やコンテナ、パレット、カメラ、カメラブラケットなどがあります。
ワークフロー¶
Mech-Viz でフローチャートの形式で作成されたロボット動作制御プログラムです。
座標系¶
Mech-Viz では以下の座標系が使用されます。
- 世界座標系
3D シミュレーションエリアの中心を原点とする座標系。位置は固定されて変わりません。
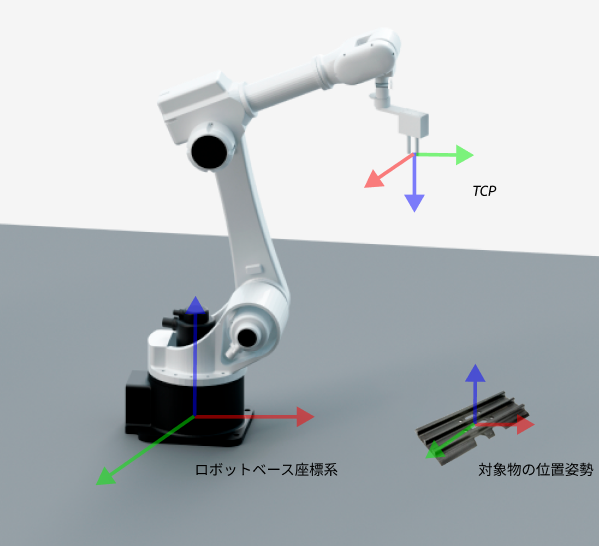
- ロボットベース座標系
原点はロボットベースの底面にあり、ロボットの位置とともに移動する座標系。ビジョン結果はカメラの外部パラメータを通じてロボットの座標系に変換するとき、この座標系に変換します。デフォルトでは世界座標系と重なり合います。
- ロボット TCP 座標系
ロボットハンドのエンドを原点とする座標系。
- シーンの物体の座標系
シーンの物体モデルの中心を原点とする座標系。各シーンの物体モデルにシーンの物体の座標系があります。
TCP[Tool Center Point](ツールセンターポイント)¶
ロボットハンドのエンドの点。
対象物把持などを実行する場合、ロボットをある点に移動するのは、TCP をこの点に移動することです。
ロボットハンドの対称性¶
ロボットハンドを対称軸を中心に一定角度回転したら元の形状と完全に重なり合うことです。