画像の鮮明さを評価¶
機能¶
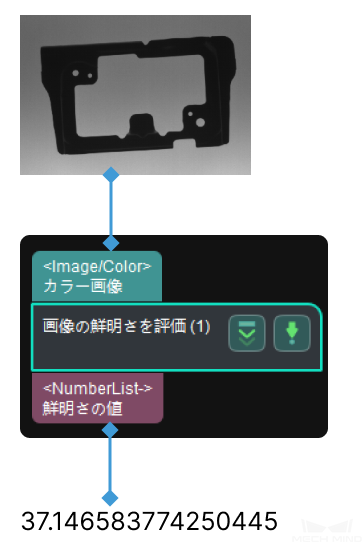
このステップは、異なる計算方法を指定することで、入力画像の鮮明さを定量的に評価することができます。
このステップでは、異なる合焦度でカメラによって撮影された1枚画像または画像群を入力し、出力結果に従ってカメラが合焦しているかどうかを評価することができます。画像の鮮明さの値が大きいほど、カメラのピントが正確に合っていることを意味します。
ヒント
鮮明さの基準とスケールは方法によって異なるため、異なる方法で得られた鮮明さの値を比較することはできません。
使用シーン¶
通常、計測シーンでカメラのパラメータと位置調整に役立ちます。
入力と出力¶
パラメータ説明¶
方法
パラメータ説明:このパラメータは、画像の鮮明さの評価方法を選択するために使用されます。オプション:Energy of Gradient、Brenner、Roberts Cross、SML、Sobel、Tenegrad調整説明:各方法の詳細な説明は次の通りです。
Energy of Gradient:画像の勾配エネルギーを関数化したもの(EOG関数と呼ぶ)です。次のように定義されています。

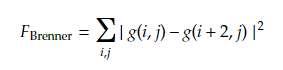
Brenner:Brenner関数を利用した方法です。次のように定義されています。
Roberts Cross:Robert演算子の差の絶対値和の関数(Robert関数と呼ぶ)に基づいています。次のように定義されています。

SML:ラプラス演算子を一部改良した手法で、ノイズ耐性が高いです。次のように定義されています。

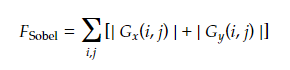
Sobel:Sobel演算子を用いた関数(Sobel関数と呼ぶ)です。次のように定義されています。式に含まれる画像のx、y方向の1次Sobel演算子差分です。
Tenegrad:この方法も、ソーベル演算子に基づく関数です。次のように定義されています。
 初期値:Brenner調整アドバイス:画像の鮮明さの評価方法は、実際のニーズに応じて選択してください。
初期値:Brenner調整アドバイス:画像の鮮明さの評価方法は、実際のニーズに応じて選択してください。