ワーク認識の可視化設定ツール¶
本節では、ワーク認識の可視化ツールの使用方法について説明します。
機能¶
ワーク認識の可視化設定ツールは、いくつかのビジョン処理機能が組み込まれています。次の3つの手順を実行するだけで、ワーク認識の関連設定を迅速に行うことができます。

ワーク選択: マッチングモデル・把持位置姿勢エディタ でワークの点群モデルを作成し、認識するワークを選択します。
前処理: 有効な認識領域の設定により、領域外の干渉要因を除去し、認識領域内の点群に対して基本処理を行い、認識効率を向上させます。
ワーク認識: 精度とタクトタイムの要件を満たすために、3Dマッチングのパラメータを可視化方式で調整します。必要に応じてディープラーニングと組み合わせて使用することができます。
使用手順¶
使用手順は以下の通りです。
ワーク選択¶
まずは ワーク選択 をクリックします。すると、モデルライブラリが表示されます。
モデルエディタを開く をクリックしてマッチングモデル・把持位置姿勢エディタを開きます。 マッチングモデル・把持位置姿勢エディタ を参照して把持するワークのマッチングモデルを作成して終了します。
モデルライブラリで把持するワークの点群モデルにチェックを入れ、マッチングモードを選択してから、 次へ をクリックして前処理を行います。
注釈
モデルライブラリには、要件を満たしているワークの点群モデルのみが表示されます。
ワークの点群モデルには、少なくとも1つの把持位置姿勢(幾何学的中心点としても使用可能)が設定されていることが必要です。
前処理¶
設定 をクリックし、表示されるROI設定画面で 3D ROIを設定 します。
3D ROIが設定後、 保存して適用 をクリックします。
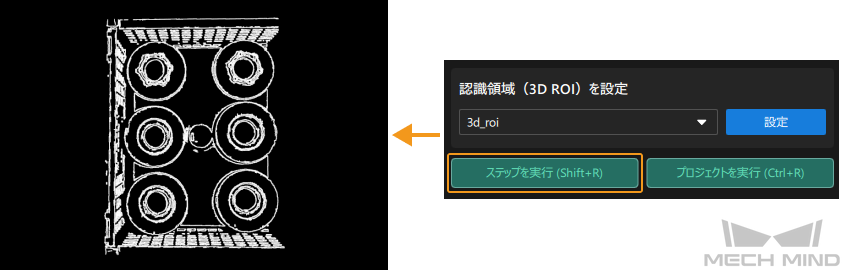
ステップを実行 をクリックすると、前処理結果が画面の左側に表示されます。
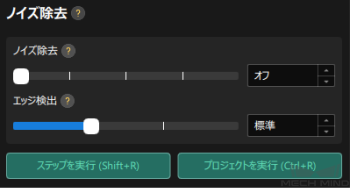
エッジ検出とノイズを除去のパラメータを設定し、ノイズを除去します。この2つのパラメータは、エッジマッチングモードでのみ調整可能です。
ヒント
前処理後の2D画像と3D画像を表示するには、画面の上部に対応するオプションを切り替えます。

前処理後、 次へ をクリックしてワークの認識を実行します。
ワーク認識¶
詳細な手順は以下の通りです。
1.3Dマッチングと結果判定に関連するパラメータを設定します。詳細については、 パラメータ説明 をご参照ください。
2.(オプション)ディープラーニングの使用が必要な場合、 ディープラーニングの使用 のドロップダウンリストからCPUまたはGPUを選択してから、モデルパッケージ管理ツールのボタンをクリックします。
3.ディープラーニングモデルパッケージのツール画面で、使用するディープラーニングモデルパッケージをインポートしたら終了します。その後、ドロップダウンリストからインポートしたモデルパッケージを選択し、信頼度しきい値を調整します。
4.ボタン ステップを実行 をクリックすると、3Dマッチングの認識結果が画面の左側に表示されます。
5.認識精度とタクトタイムが要件を満たしている場合、 完了 をクリックしてワーク認識の可視化設定ツールが自動的に終了します。または、 次のワーク をクリックして次のワーク認識を実行します。
パラメータ説明¶
3Dマッチング
- 実行モード
- パラメータ説明:このパラメータは、ワークの認識過程において認識の精度とパフォーマンスを設定するために使用されます。オプション:高速、標準、高精度、超高精度。
高速:単独に配置されるワーク、または少量の整列されるワークに対応可能です。
標準:一般的なワーク供給に適しており、速度と精度のバランスを考慮した戦略です。
高精度:大量のワーク、またはバラ積みのワークに対応可能です。
超高精度:高精度位置決めが必要なシーンにおすすめです。
初期値:標準。調整アドバイス:認識精度とパフォーマンスの要件に応じてこのパラメータを調整する必要があります。 - 偏差補正能力
- パラメータ説明:このパラメータは、偏差補正能力のレベルを設定するために使用されます。レベルが大きいほど、ずれた位置姿勢を正確なものに補正することができますが、大きすぎると精度が落ちます。オプション:高レベル、中レベル、低レベル。
低レベル:ほとんどの場合に適用可能です。
中レベル:実際の状況に応じて選択する必要があります。
高レベル:実際の状況に応じて選択する必要があります。
初期値:低レベル。調整アドバイス:マッチング結果が実際のワークと大きな偏差がある場合、このパラメータを調整する必要があります。 - 対称性設定
- パラメータ説明:認識するワークが局所的な対称性を持っている場合は、マッチング結果が局所最適にならないように対称性の設定を大きくし、より良いマッチング結果を得ることができます。調整説明:詳細は以下の通りです。
回転対称軸:ワークの幾何学的中心のある軸を回転軸として選択します。
対称角度のステップサイズ:回転軸を中心に60°回転する前後でワークが同じに見える場合、このパラメータを60°に設定することができます。
最小回転角度:ワークを対称軸を中心に回転させることができる最小の角度のことです。
最大回転角度:ワークを対称軸を中心に回転させることができる最大の角度のことです。
- 位置姿勢フィルタリング設定
- パラメータ説明:認識結果に異常な向きの位置姿勢がある場合、異常な認識結果を除去するために位置姿勢のフィルタリング設定を行います。エッジマッチングの場合、これを使用することを推奨します。モデルの回転角度による位置姿勢をフィルタリング:エッジマッチングモードでは、シーンの点群にマッチングするために点群モデルをある角度だけ回転させる必要がある場合があり、点群モデルの回転角度で位置姿勢が除去されます。モデルの回転角度が 角度差の上限しきい値 を超えると、その位置姿勢は除去されます。
結果判定
- 3Dマッチングの信頼度しきい値
- パラメータ説明:このパラメータは、3Dマッチングの認識結果の信頼度しきい値を設定するために使用されます。3Dマッチングの認識結果の信頼度がこの値より大きい場合、有効な結果と見なされます。値が高いほど、より正確な結果を得ることができます。初期値:0.300調整アドバイス:実際の状況に応じて設定する必要があります。
- 最大出力数
- パラメータ説明:このパラメータは、3Dマッチングの認識結果の最大数を設定するために使用されます。複数の結果がある場合、信頼度で降順にソートし、設定された 最大出力数 に従って信頼度の高い結果を出力します。初期値:1調整アドバイス:認識結果が多い場合、または結果の数に対して要件がある場合、このパラメータを調整する必要があります。
ヒント
取得されたワークの把持点には、幾何学的中心であり把持点でもある点のみを表示します。
実際に出力される3Dマッチングの認識結果の数は、設定された 最大出力数 と一致しない場合があります。例えば、設定された 最大出力数 を5に設定しても3Dマッチングの認識結果が合計で3つしかない場合、実際に出力される結果の数は3になります。