Move by List¶
Note
Contents of this Step are under maintenance. If you need more information about this Step with urgency, please contact us at docs@mech-mind.net.
Function¶
This Step is used to set multiple waypoints in the path according to the list and specify the way to move to those waypoints, and guide the robot to move to the waypoints in sequence.
Parameter Description¶
- Move-Type Step Common Parameters
Please refer to General Parameters of Move-Type Steps for detailed information.
- Held Workobject Collision Detection Settings
Please refer to Held Workobject Collision Detection Settings for detailed information.
Note
Index
- Starting Index
The index of the waypoint to be executed. For example, the index of the first waypoint is 0, if you want the robot to move from the third waypoint in the list, please set the value to 2.
- Current Index
The index of the waypoint currently being executed.
- All Waypoints in One Move
Once this parameter is selected, the Index will not be disabled and the robot will move through all waypoints in the list in sequence at once.
- Use Basic Move Settings at Global Scale
Once this parameter is selected, all waypoints in the move list will use the same Basic Move parameters.
- Basic move settings
Please refer to Basic Move Settings for detailed information.
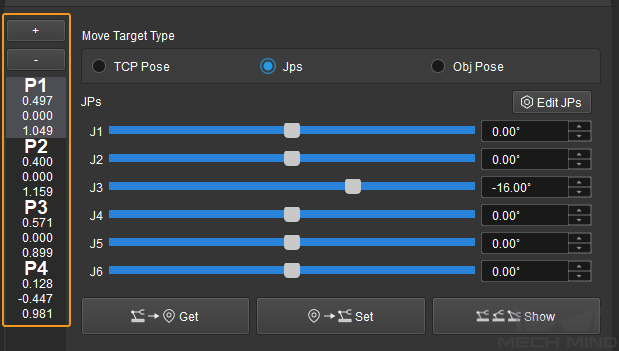
- Waypoint Type
Please refer to Waypoint Type for detailed information.
- Move List
Add the waypoints in the move list in sequence manually and set corresponding parameters.
Click + to add a waypoint at the end of the list, and click - to delete the selected waypoint.
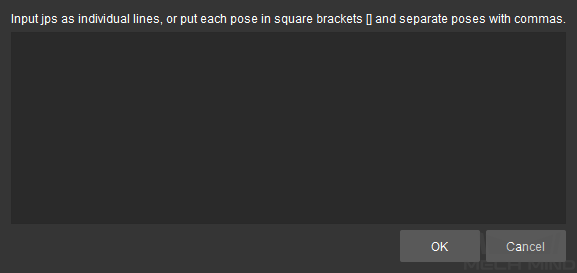
- Add TCP List
You can add multiple waypoints as TCP in the list at once.
Input TCP as individual lines in the Add TCP Pose List window.
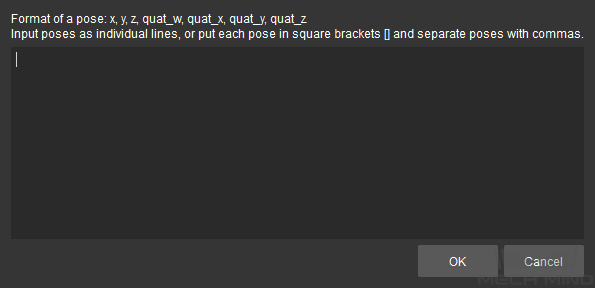
- Add JPs List