Move by Grid¶
Note
Contents of this Step are under maintenance. If you need more information about this Step with urgency, please contact us at docs@mech-mind.net.
Function¶
This Step is used to set multiple waypoints in the path according to the grid and specify the way to move to those waypoints, and guide the robot to move to the waypoints in sequence.
Parameter Description¶
- Move-Type Step Common Parameters
Please refer to General Parameters of Move-Type Steps for detailed information.
- Held Workobject Collision Detection Settings
Please refer to Held Workobject Collision Detection Settings for detailed information.
Note
Not Check Collision is usually used in the first or second move-type Steps after the robot picks the object. It may increase the risk of collision. Please enable with caution.
Enabling Not Check Collision with Scene Object will not affect the collision detection between the held carton and the placed cartons. When there are scene objects under the pallet, this function can be used to avoid solution selection failure for palletizing.
Index
- Starting Index
The index of the waypoint to be executed. Example: The index of the first waypoint is 0, if you want the robot to move from the third waypoint in the grid, please set the value to 2.
- Current Index
The index of the waypoint currently being executed.
Grid
This parameter specifies the number and spacing of the current grid points in each direction.
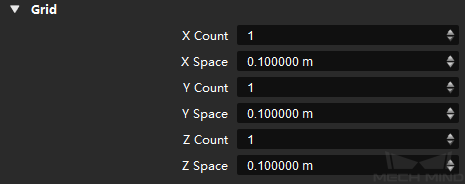
- X Count:
The number of waypoints in the X direction of the grid.
- X Space:
The spacing between two waypoints in the X direction of the grid.
- Y Count:
The number of waypoints in the Y direction of the grid.
- Y Space:
The spacing between two waypoints in the Y direction of the grid.
- Basic move settings
Please refer to Basic Move Settings for detailed information.
- Show Base
Once this parameter is selected, the grid waypoints and the corresponding index will be displayed in the 3D simulation area.
- Show Robot
Once this parameter is selected, the robot and workobject pose will be displayed in the 3D simulation area, while the grid will not be displayed.
- Waypoint Type
Please refer to Waypoint Type for detailed information.
- Jps Constraint
Please refer to JPs Constraint for detailed information.