位置姿勢のある軸を指定された方向に向ける¶
使用シーン¶
通常、位置姿勢の方向の調整が必要な各種のシーンに適用されます。
このステップは古いバージョンであり、物体の対称性に応じて位置姿勢を回転する場合(このステップでパラメータ「補正方法」を「ROTATION」に設定してください)、新しいバージョンの 対称性制約で位置姿勢を指定方向に回転 を使用し、ステップ 3Dベクトルをクイック作成 と併用してください。
入力と出力¶
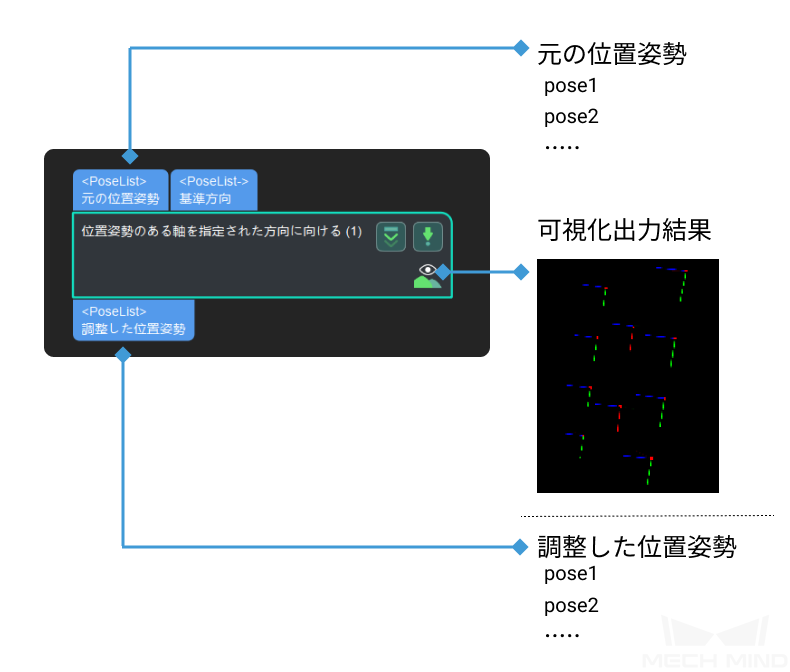
パラメータ説明¶
可視化設定
- 位置姿勢表示の設定
- 初期値:処理済みの位置姿勢のみを表示。値のリスト:入力位置姿勢のみを表示、出力位置姿勢のみを表示、入力と出力をすべて表示。調整説明:処理後の位置姿勢、処理前の位置姿勢、処理前後の全ての位置姿勢をそれぞれ表示します。
方法選択
- 補正方法
- HARD_RECTIFY:初期値。二番目の入力(基準位置姿勢)があり、「useFirstRefPose」にチェックを入れた場合、基準方向は最初の位置姿勢に対応する軸の方向です。それ以外の場合は、すべての基準位置姿勢に対応する軸のタイプを基準方向とします。基準位置姿勢の入力がない場合、「reference Dir」は基準方向を決めます。ROTATION:物体の対称性に応じて対称角度を設定し、調整する回転軸を指定した基準軸の方向とほぼ同じにします。
軸の設定
- 調整する軸
- 調整説明:補正する回転軸です。オプション:X、Y、Z(初期値)
基準方向
- X軸
- 初期値:0。調整説明:基準軸Xの方向ベクトルです。
- Y軸
- 初期値:0。調整説明:基準軸Yの方向ベクトルです。
- Z軸
- 初期値:1。調整説明:基準軸Zの方向ベクトルです。