FANUC CRX 接口指令说明¶
Mech-System 通讯初始化¶
该指令用于设置 IPC 通讯地址和端口。
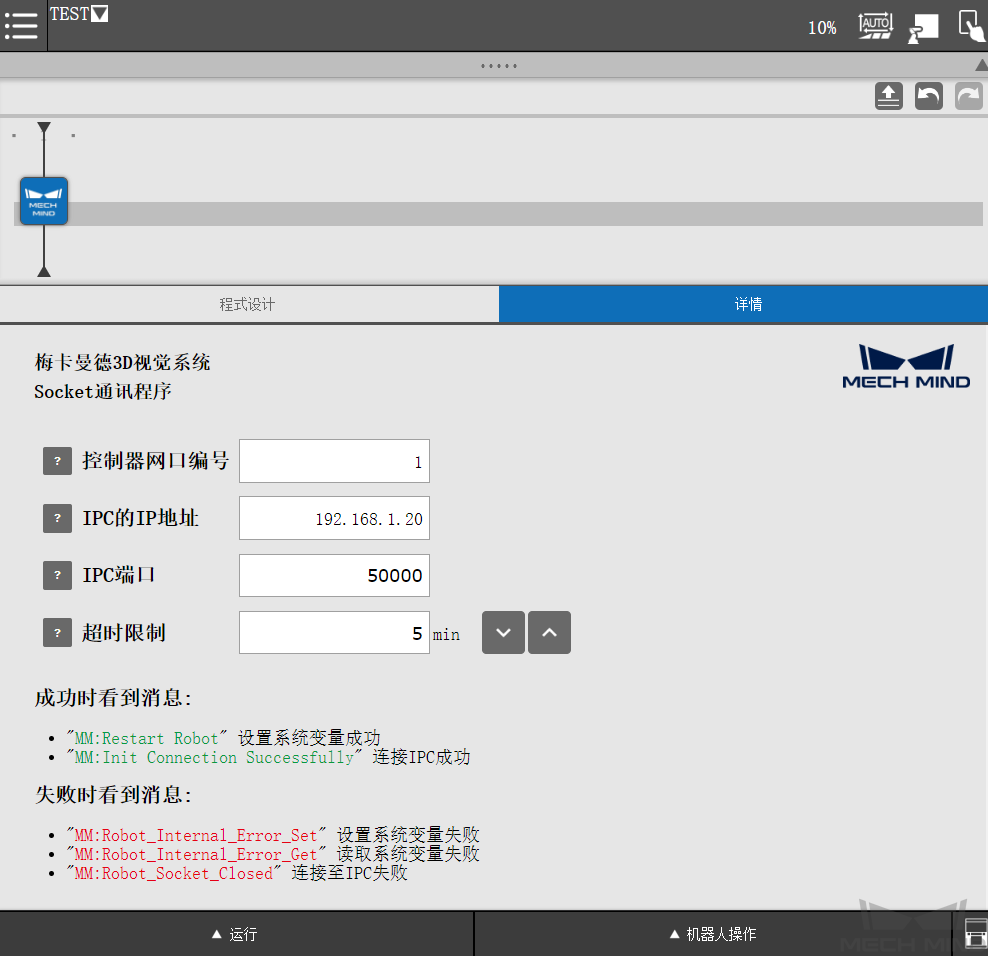
参数说明
参数 |
描述 |
控制器网口编号 |
控制器与工控机通信所使用的网口编号 |
IPC 的 IP 地址 |
工控机的 IP 地址 |
IPC 端口 |
Mech-Vision 中配置的端口号 |
超时限制 |
超时等待时间(单位为 min ) |
注意
在不需要更改设置的情况下,用户在安装 CRX 插件之后,只需要执行一次通信配置,后续标定程序和正常使用过程可以不用再次进行通信配置。
Mech-Eye 相机标定¶
该指令用于相机外参的自动标定,需配合 Mech-Vision 软件的相机标定工具,可以实现全自动标定。

参数说明
参数 |
描述 |
移动方式 |
自动标定过程,机器人的移动方式,用户可以选择直线运动或关节角运动 |
数据类型 |
机器人发送的点位类型,用户可以选择关节角数据或者坐标数据 |
到位等待 |
机器人移动到标定点后的等待时间(防止机器人发生抖动),通常设置为 1-5s 即可 |
机器人轴数 |
默认为 6 轴,若机器人有第七轴,则需设置为 7 |
外部轴数据 |
用于支持带第 7 轴的机器人,该值设置为标定时第 7 轴固定的位置数据 |
PR 寄存器编号 |
此值需要设置成存储标定起始点位置的寄存器的编号 |
Mech-Vision 触发¶
该指令用于触发 Mech-Vision 工程运行。

参数说明
参数 |
描述 |
工程编号 |
Mech-Vision 工程编号,可在 Mech-Vision 工程列表窗口中查看,工程名称前的数字表示工程编号 |
位姿编号 |
期望 Mech-Vision 输出的视觉点数量 * 如果设置为 0,输出所有检测出的视觉点,但不超过 20 个 * 如果设置为 1 到 20 之间的整数,若检测出的视觉点总数大于设定的期望值,Mech-Vision 将尝试返回固定数量的视觉点 |
位姿类型 |
各轴: 将机器人当前关节角值发送给 Mech-Vision 法兰位姿:将机器人当前法兰位姿发送给 Mech-Vision |
Mech-Vision 获取数据¶
该指令用于接收 Mech-Vision 工程运行的结果,需要连接在 Mech-Vision 触发 之后。
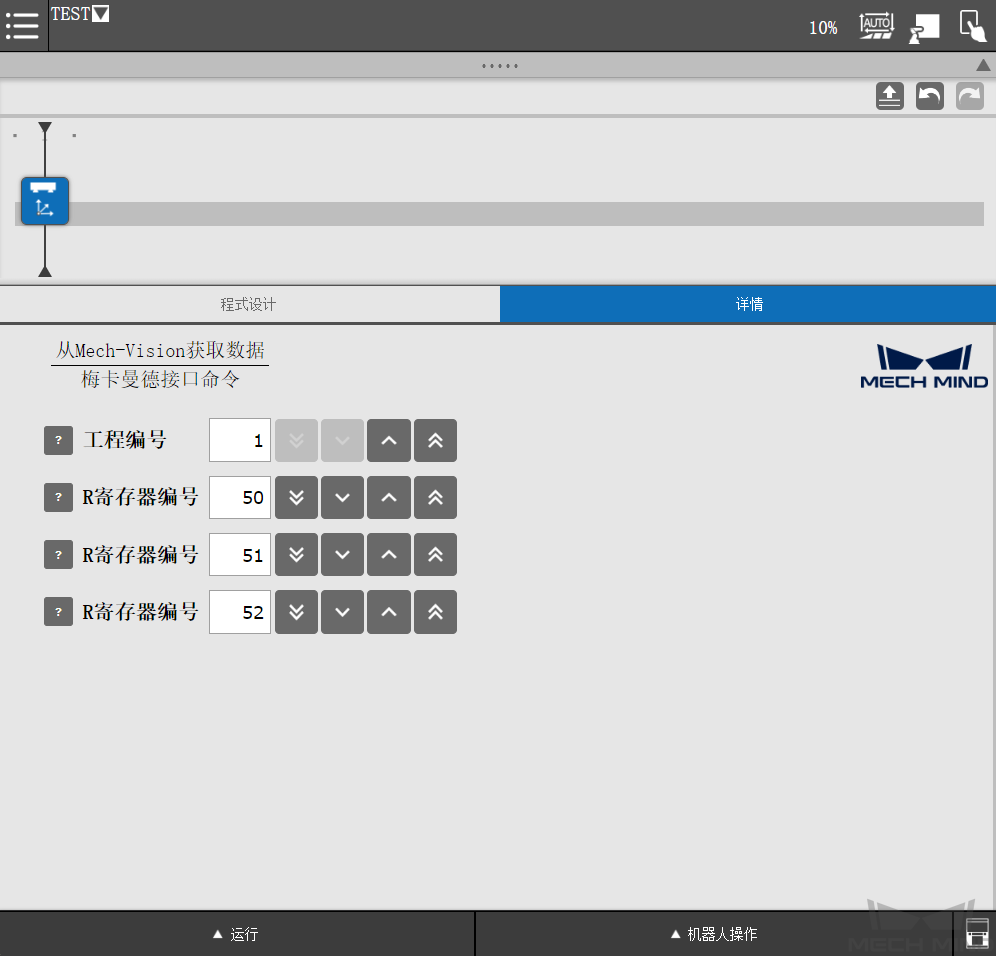
参数说明
参数 |
描述 |
工程编号 |
Mech-Vision 工程编号,可在 Mech-Vision 工程列表窗口中查看,工程名称前的数字表示工程编号 |
R 寄存器 1 |
1:Mech-Vision 数据发送完毕 0:Mech-Vision 数据未发送完毕,可再次调用 Mech-Vision 获取数据 接收剩余数据 |
R 寄存器 2 |
接收到的视觉点数量 |
R 寄存器 3 |
接收到的状态码 |
Mech-Vision 切换视觉配方¶
该指令用于 切换 Mech-Vision 工程的参数配方 ,需要在 Mech-Vision 中已 配置并保存了参数配方 ,并且连接在 Mech-Vision 触发 之前。

参数说明
参数 |
描述 |
工程编号 |
Mech-Vision 工程编号,可在 Mech-Vision 工程列表窗口中查看,工程名称前的数字表示工程编号 |
配方编号 |
Mech-Vision 工程中的 配方编号 |
Mech-Vision 外部传入尺寸¶
该指令用于给 Mech-Vision 工程中 “读取物体尺寸” 步骤传入物体尺寸。

参数说明
参数 |
描述 |
工程编号 |
Mech-Vision 工程编号,可在 Mech-Vision 工程列表窗口中查看,工程名称前的数字表示工程编号 |
长 |
设置物体尺寸中的长度 |
宽 |
设置物体尺寸中的宽度 |
高 |
设置物体尺寸中的高度 |
Mech-Viz 触发¶
该指令用于触发 Mech-Viz 工程运行。
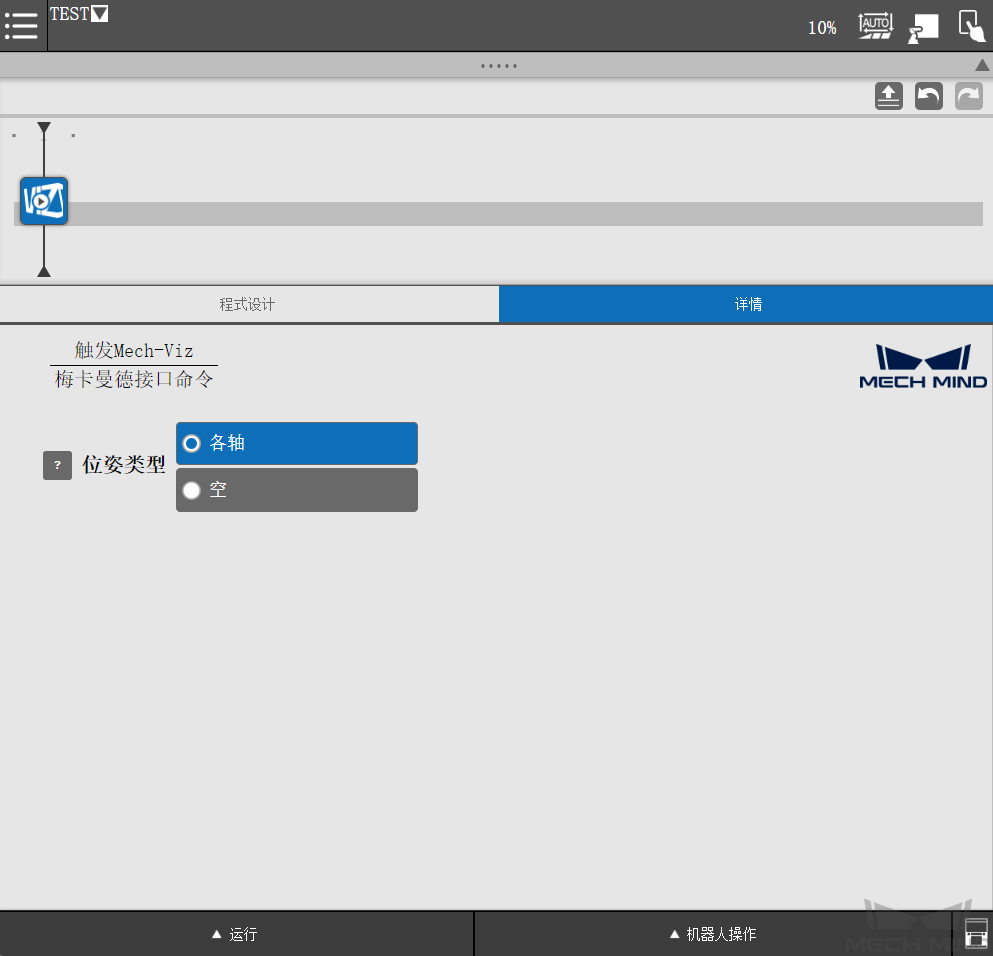
参数说明
参数 |
描述 |
位姿类型 |
各轴:将机器人当前关节角值发送给 Mech-Viz 以同步机器人运动并规划初始位置 空:不发送机器人当前位置 |
Mech-Viz 获取数据¶
该指令用于接收 Mech-Viz 工程运行的结果,需要连接在 Mech-Viz 触发 之后。
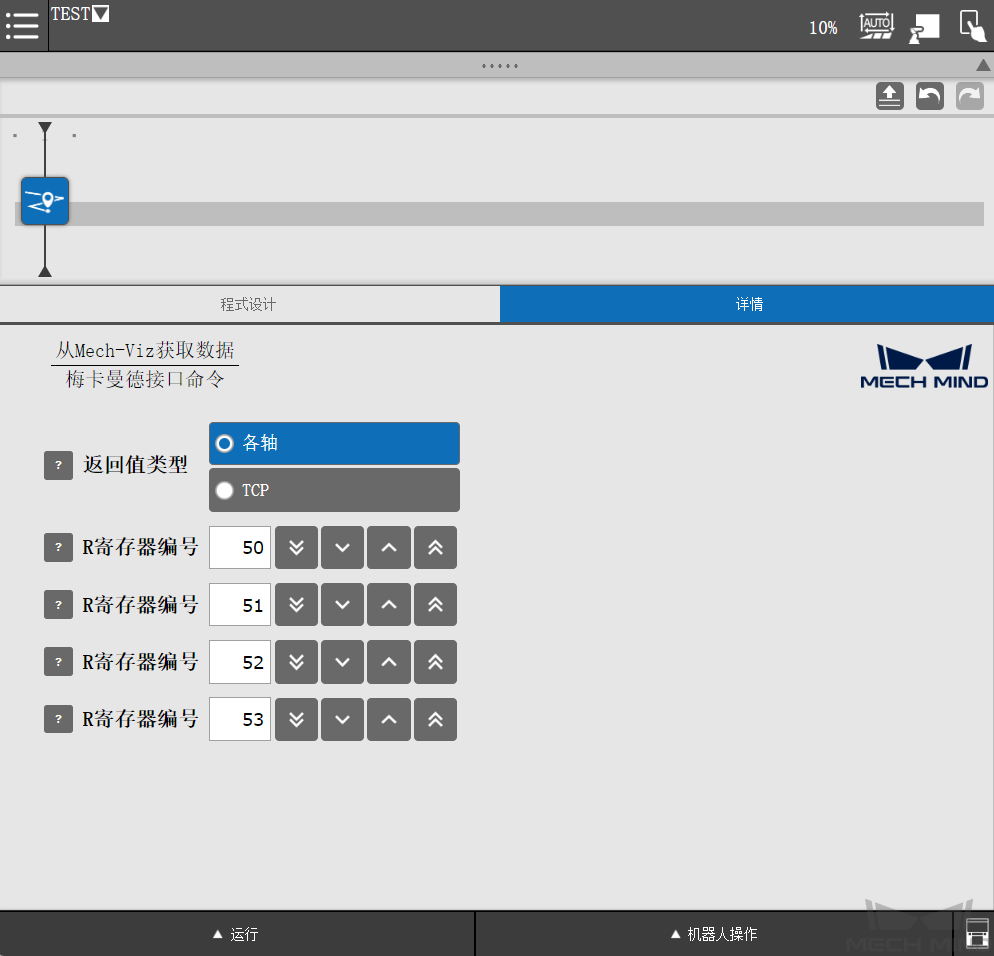
参数说明
参数 |
描述 |
返回值类型 |
1:路径点的关节角值 2:路径点的 TCP 坐标值 |
R 寄存器 1 |
1:Mech-Viz 数据发送完毕 0:Mech-Viz 数据未发送完毕,可再次调用 Mech-Viz 获取数据 接收剩余数据 |
R 寄存器 2 |
接收到的路径点数量 |
R 寄存器 3 |
抓取点在路径中的位置 |
R 寄存器 4 |
接收的状态码 |
Mech-Viz 设置分支¶
该指令用于给 Mech-Viz 工程中的“消息分支”步骤设置出口号。

参数说明
参数 |
描述 |
分支名称 |
“消息分支”的步骤编号对应的值 |
分支出口 |
给定分支的出口号,Mech-Viz 程序将沿该出口继续执行,参数范围为 [1~99] |
Mech-Viz 设置索引¶
对于属性中带有索引的移动类步骤,比如按序列移动、按阵列移动、自定义垛型、预设垛型等,调用该指令可以设置属性中的当前索引值。

参数说明
参数 |
描述 |
移动步骤编号 |
该步骤的步骤编号对应的值 |
索引值 |
设置索引值,该值为 Mech-Viz 中显示的当前索引值加 1 |
Mech-System 获取位姿¶
该指令用于将 Mech-Vision 返回的视觉结果里某个视觉点,或 Mech-Viz 返回的移动路径里某个路径点,转存到指定位姿变量中。若想获取多个视觉点或路径点,只需要使用多个该命令,然后修改位姿编号即可。

参数说明
参数 |
描述 |
位姿编号 |
该值表示将要转存第几个抓取点 |
PR 寄存器 |
将用户指定的抓取点坐标保存到该指定 PR 寄存器 |
R 寄存器 1 |
将用户指定的抓取点标签保存到该指定 R 寄存器 1 |
R 寄存器 2 |
将用户指定的抓取点移动速度保存到该指定 R 寄存器 2,其值始终为 0 |
Mech-System 获取关节角¶
该指令用于将 Mech-Viz 软件返回的移动路径里的某个路径点的关节角数据转存到指定位姿变量中。若想获取多个路径点的关节角数据,只需要使用多个该命令,然后修改位姿编号即可。

参数说明
参数 |
描述 |
位置编号 |
该值表示将要转存第几个路径点 |
PR 寄存器 |
将用户指定的路径点关节角值保存到该指定 PR 寄存器 |
R 寄存器 1 |
将用户指定的路径点标签保存到该指定 R 寄存器 1 |
R 寄存器 2 |
将用户指定的路径点移动速度保存到该指定 R 寄存器 2 |