ESTUN¶
本节介绍如何主控 ESTUN 机器人。
建立网络连接¶

设置机器人控制器 IP¶
为了工控机与机器人控制器能够正常通信,请确保它们的 IP 地址在同一网段。如果工控机的 IP 地址为 192.168.100.1(子网掩码:255.255.255.0),则机器人控制器的 IP 地址应设为 192.168.100.x(子网掩码:255.255.255.0);如果工控机的 IP 地址为 192.168.100.1(子网掩码:255.255.0.0),则机器人控制器的 IP 地址应设为 192.168.x.x(子网掩码:255.255.0.0)。
进入示教器主页面,单击 用户登录 。

在当前用户下拉列表中,选择 管理员 ,弹出输入密码窗口。

提示
管理员的默认密码为 000000。
以管理员身份登录后,返回主页面,依次单击 高级设置 -> 网络设置 。


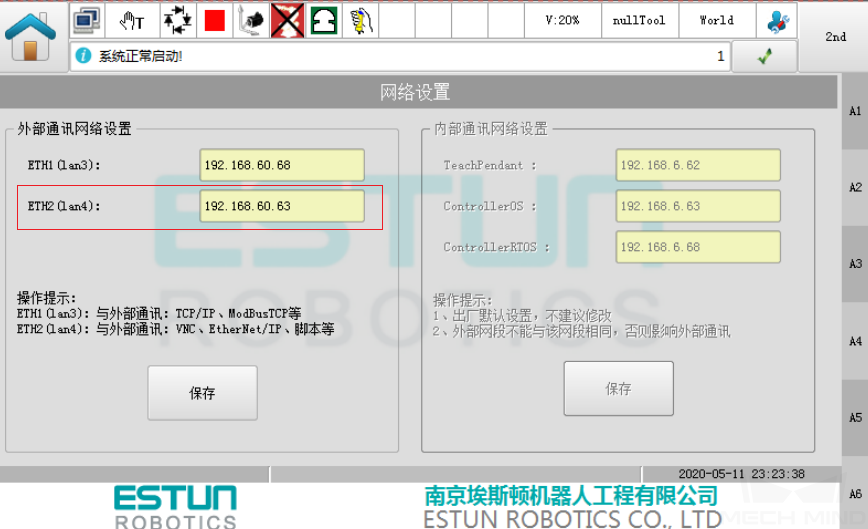
设置此处 ETH2(lan4)地址,并单击保存。
小技巧
此处 ETH2(lan4)地址将用于与 VNC 通信。
配置机器人主控程序¶
为了与梅卡曼德视觉系统进行主控通信,用户需要在机器人控制器上准备并配置机器人主控程序。准备机器人主控程序,用户需要先通过 VNC 连接机器人的底层控制系统。
使用 TightVNC 连接机器人的底层控制系统¶
TightVNC 是一款远程控制软件,可让用户轻松控制远程计算机。此处在工控机上使用 TightVNC 远程连接机器人系统,以方便用户修改机器人系统中的文件。
下载
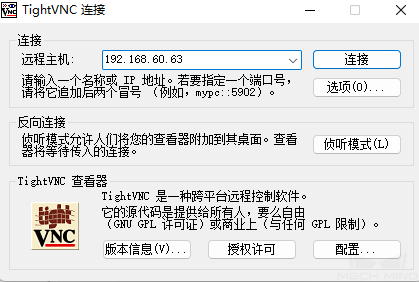
TightVNC 软件至工控机,并解压。双击 tvnviewer.exe 文件,填写主机 IP 地址(此处 IP 为上述 ETH2(lan4)地址),单击 连接 。
提示
第一次运行 tvnviewer.exe,可能会提示该文件为恶意文件,此时忽略该提示即可。
在身份验证窗口,输入密码(ERC654321),单击 确定 。
提示
ESTUN 机器人底层控制系统的默认密码为 ERC654321。
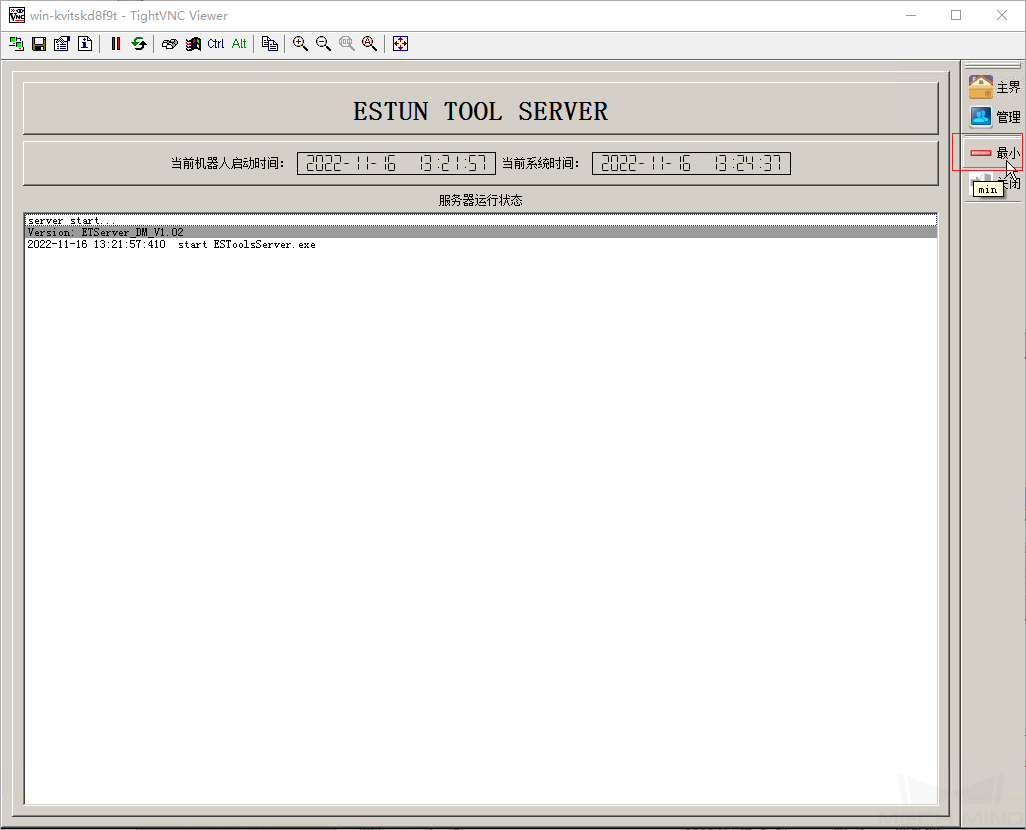
进入底层控制系统后,单击右侧栏中 管理 。
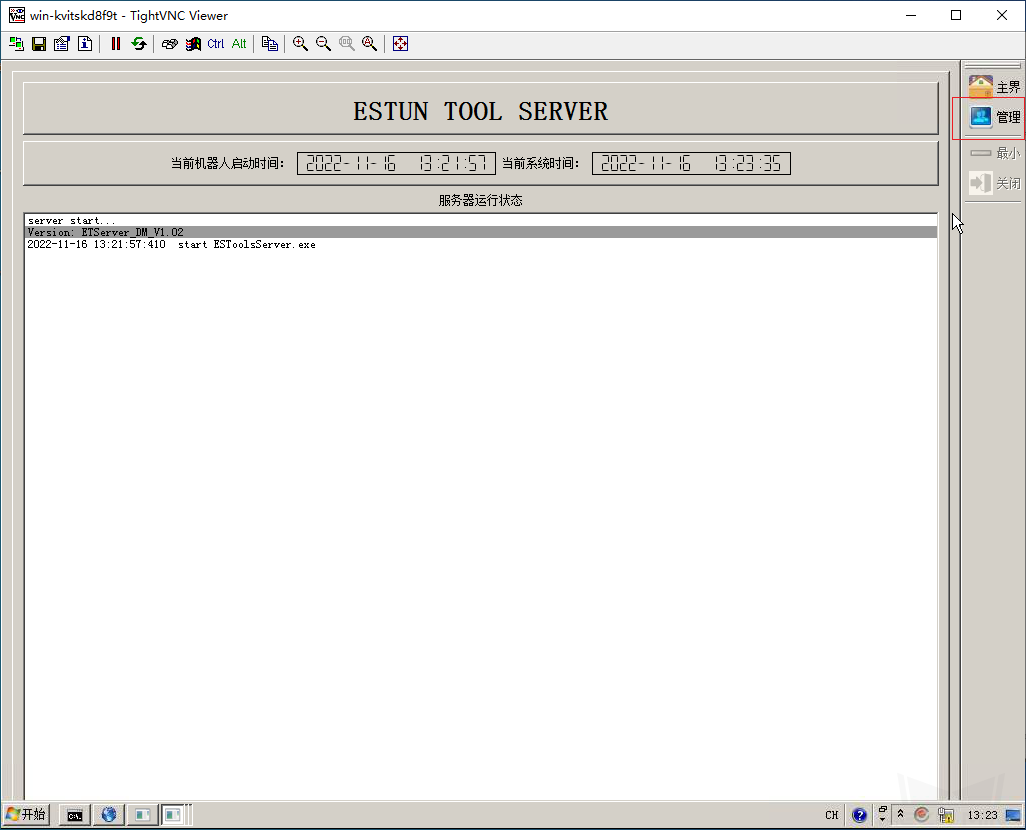
在弹框中输入密码(estun),单击右侧栏中 最小 ,便出现 Windows 系统的桌面。
准备并配置主控程序¶
注意
此处涉及 Python 脚本文件,因此需提前确认 Windows 系统中已安装 Python 2.7,且已配置 Python 环境变量,详细信息参考 配置 Python 。
以下准备机器人主控程序“Robot3DFaceTestSrv1.py”,并配置其启动设置。
双击桌面的计算机,然后打开 C:/runtime/python/sdk/libs/Robot3DFace 目录。
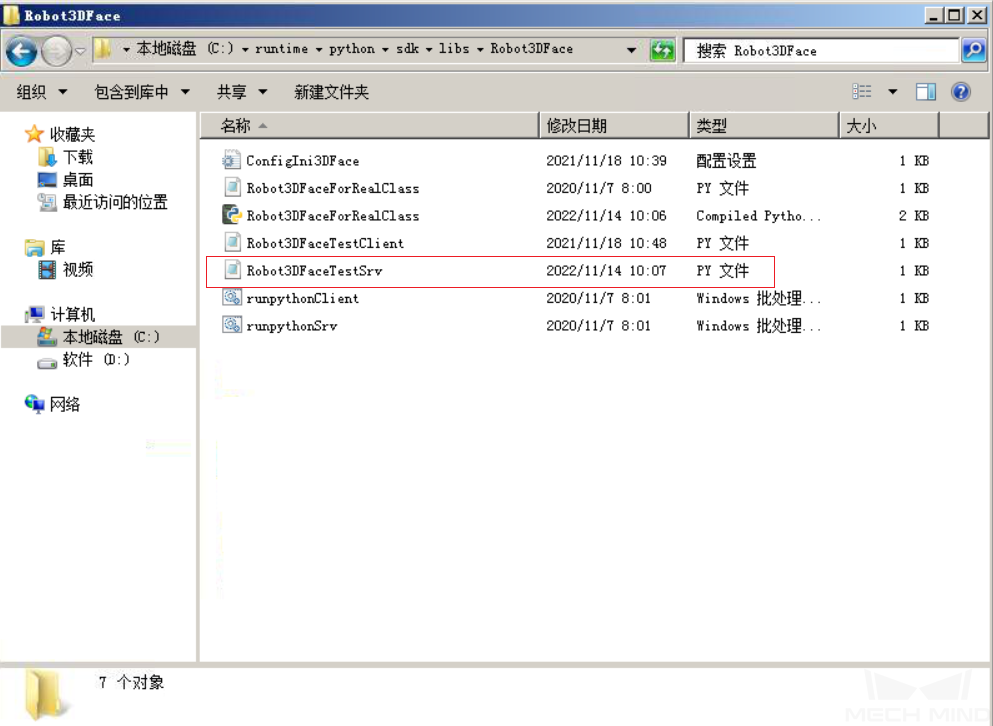
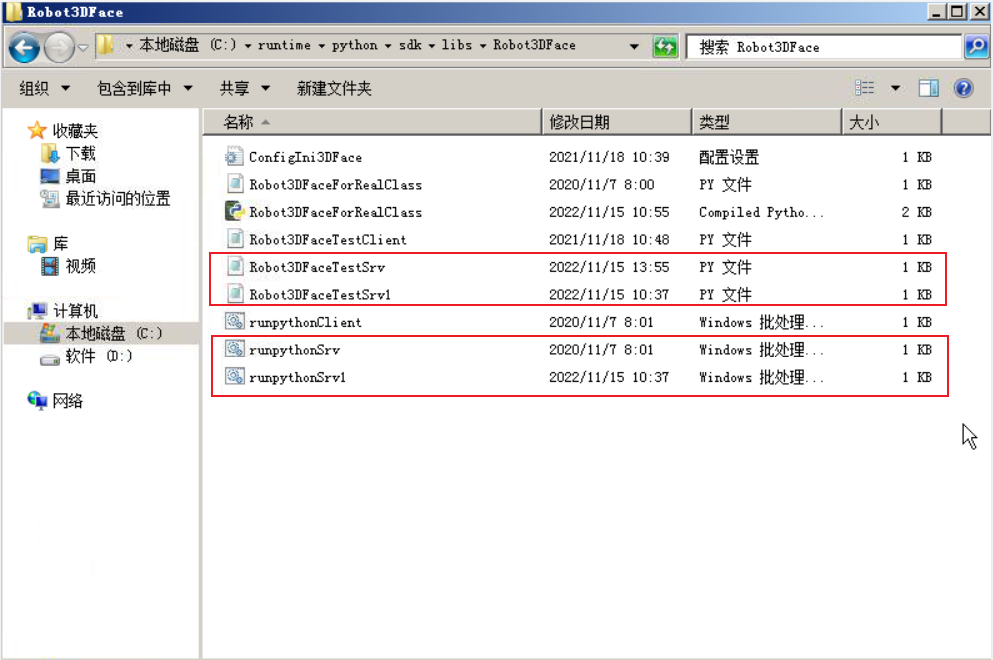
在该目录下,复制 Robot3DFaceTestSrv.py 和 runpythonSrv.bat 文件,并将相应副本分别重命名为 Robot3DFaceTestSrv1.py 和 runpythonSrv1.bat。
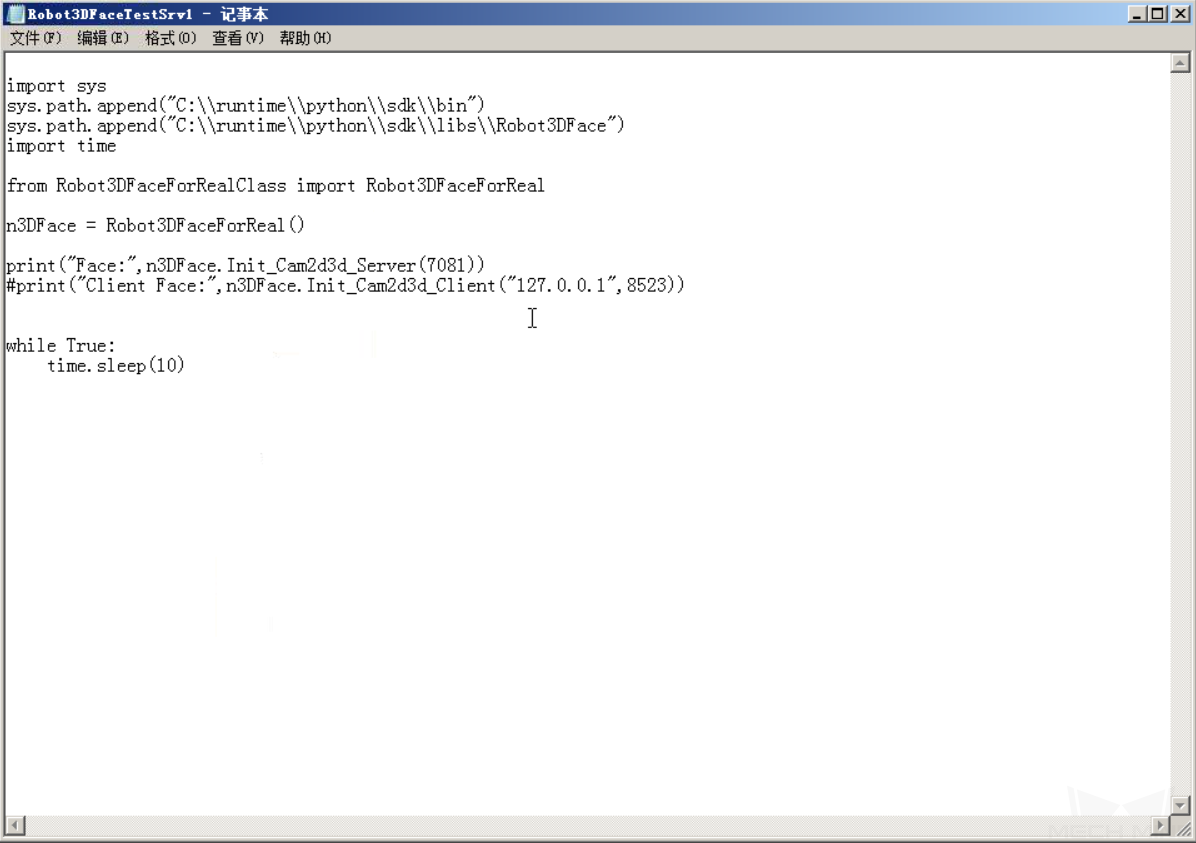
使用记事本打开 Robot3DFaceTestSrv1.py 文件,将 7080 端口号修改为 7081,然后保存并关闭该文件。
使用记事本打开 runpythonSrv1.bat 文件,将 Robot3DFaceTestSrv.py 修改为 Robot3DFaceTestSrv1.py,然后保存并关闭该文件。
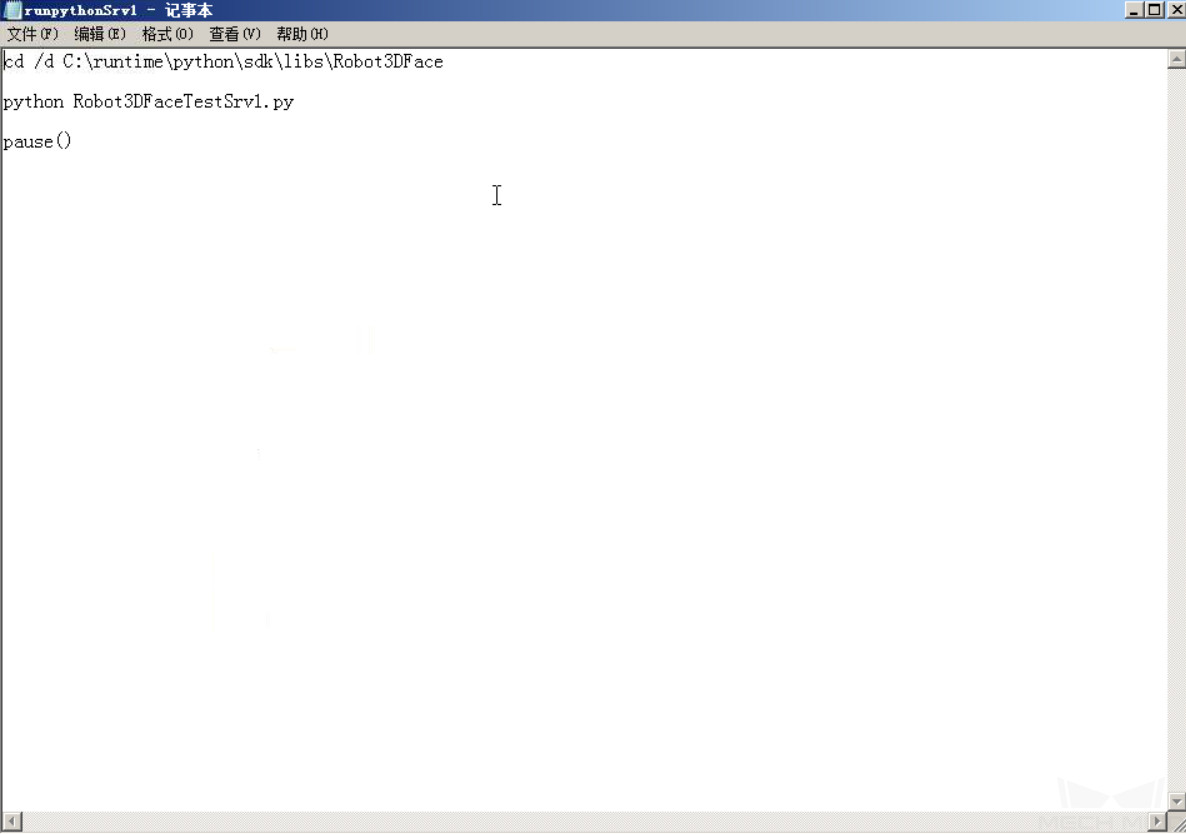
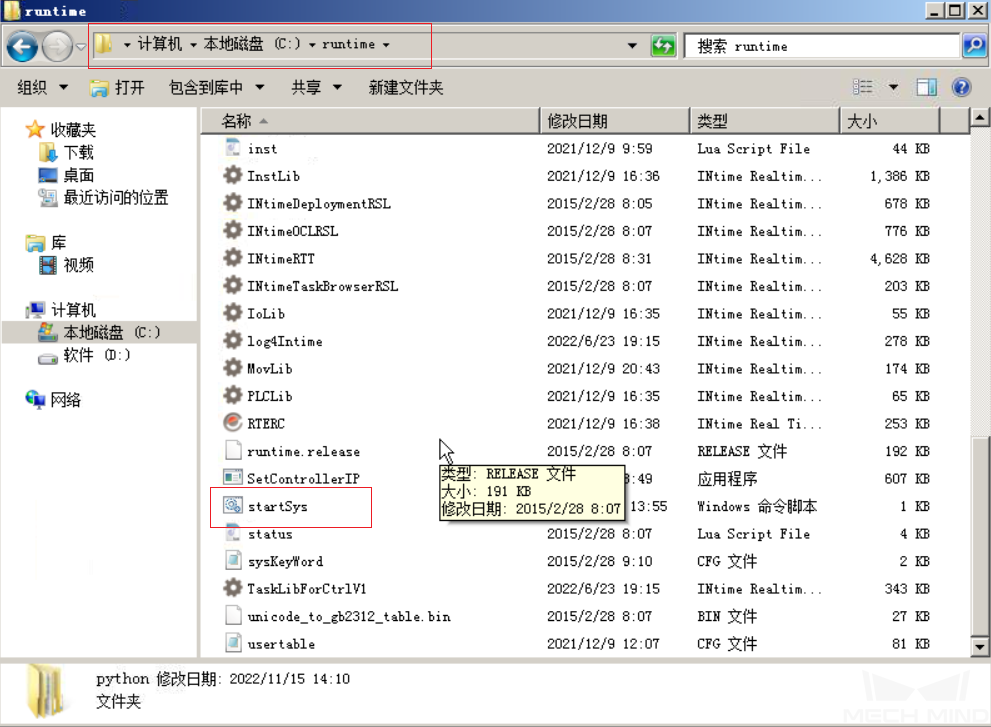
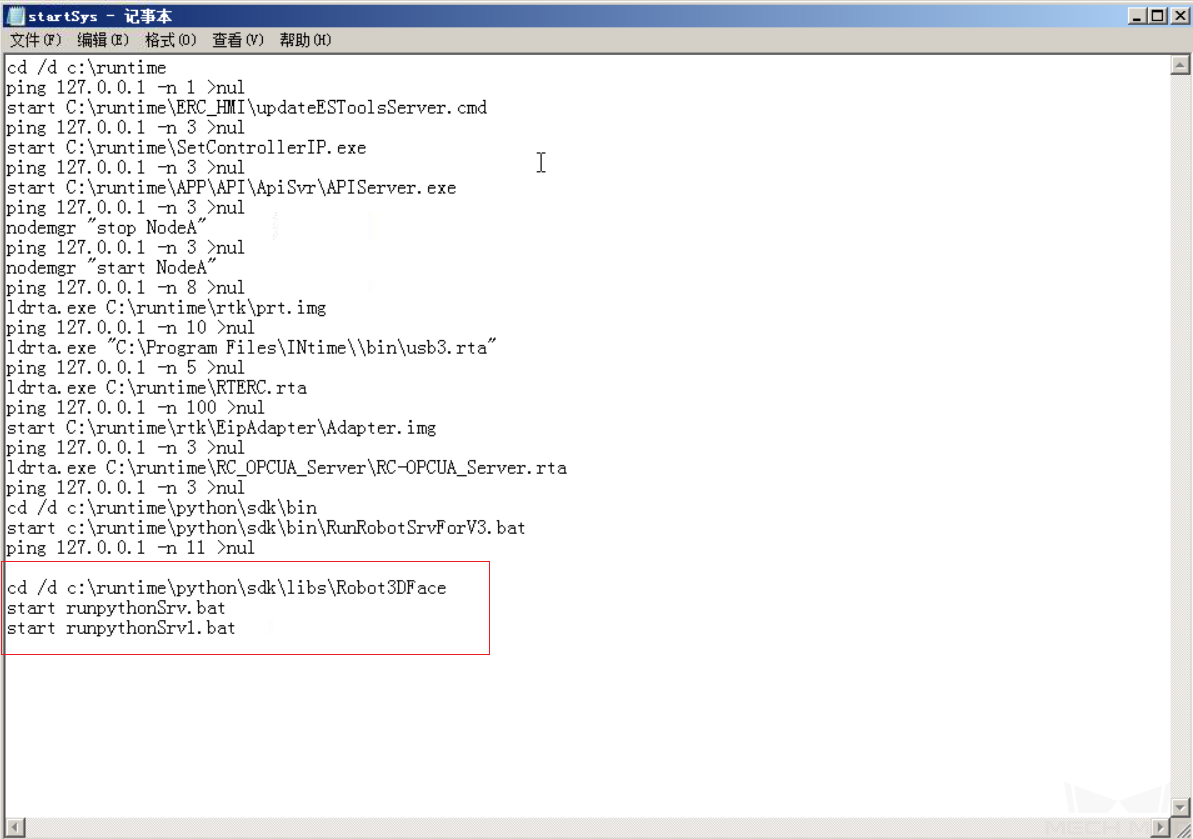
进入 C:/runtime 目录下,打开 startSys 文件,在最后一行后,添加如下三行代码。
cd /d c:\runtime\python\sdk\libs\Robot3DFace start runpythonSrv.bat start runpythonSrv1.bat
完成上述配置后,重启机器人。