点云变换¶
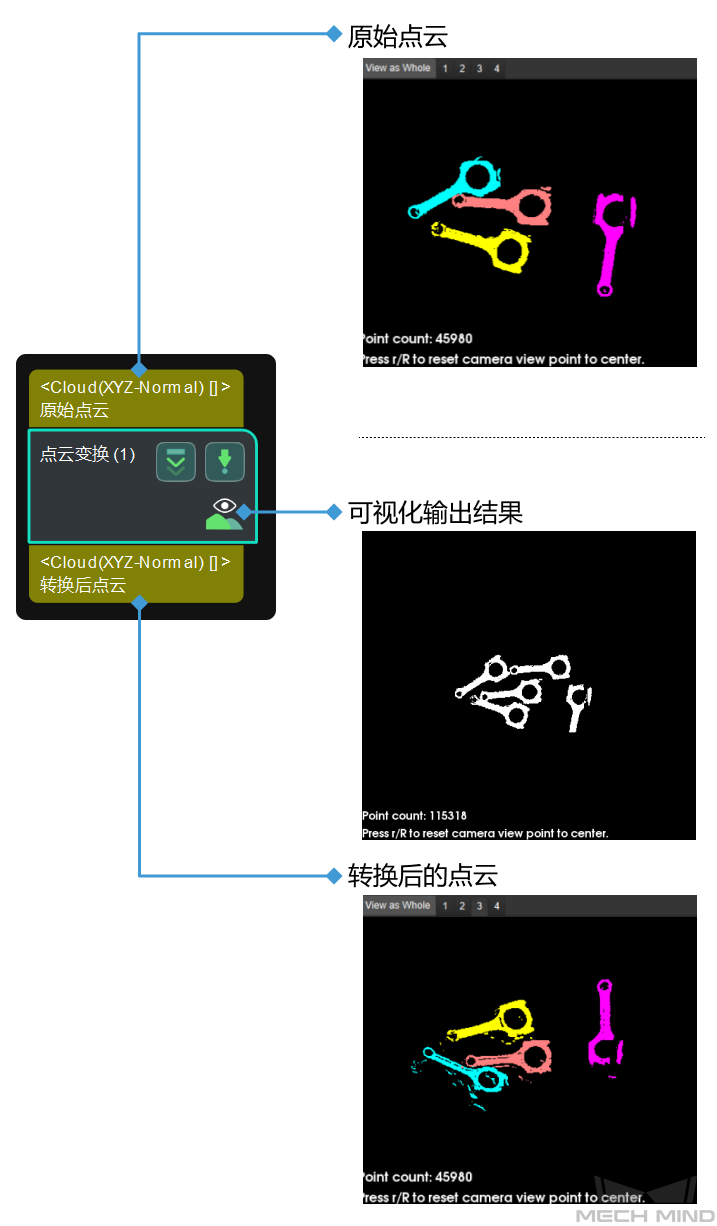
输入与输出¶
参数说明¶
变换设置
- 变换类型
- 参数解释:该参数用于设置点云的变换类型。默认值:CameraToRobot值列表:CameraToRobot、RobotToCamera、AllWithFrst、FirstWithAll、UseCorrespondenceInput、AffineTransform调节说明:
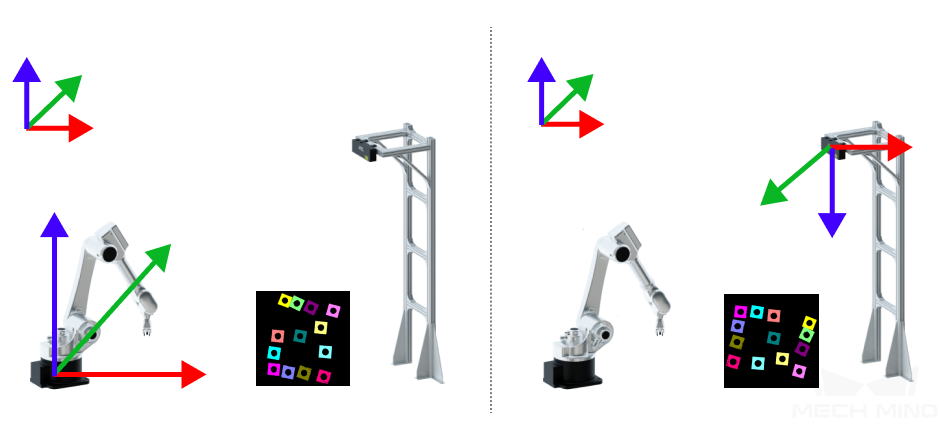
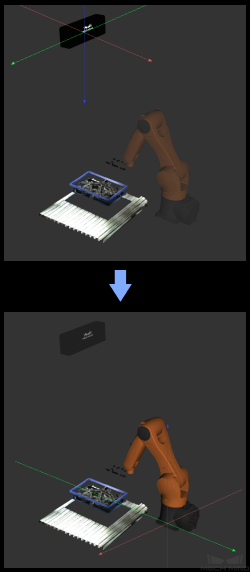
CameraToRobot:将点云由相机坐标系转换到机器人坐标系。具体效果见 调节示例 。
RobotToCamera:将点云由机器人坐标系转换到相机坐标系。具体效果见 调节示例 。
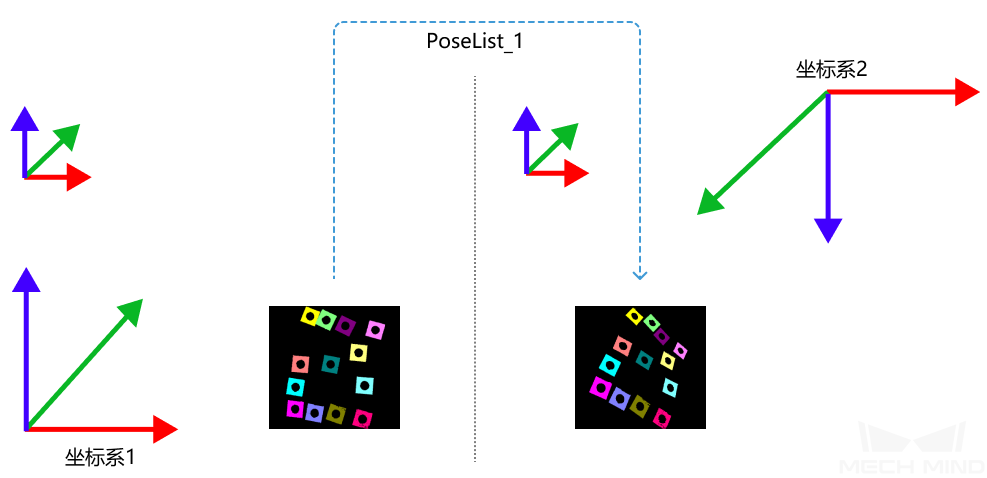
AllWithFrst:使用输入的第一个参考位姿变换点云,需输入参考位姿列表。具体效果见 调节示例 。
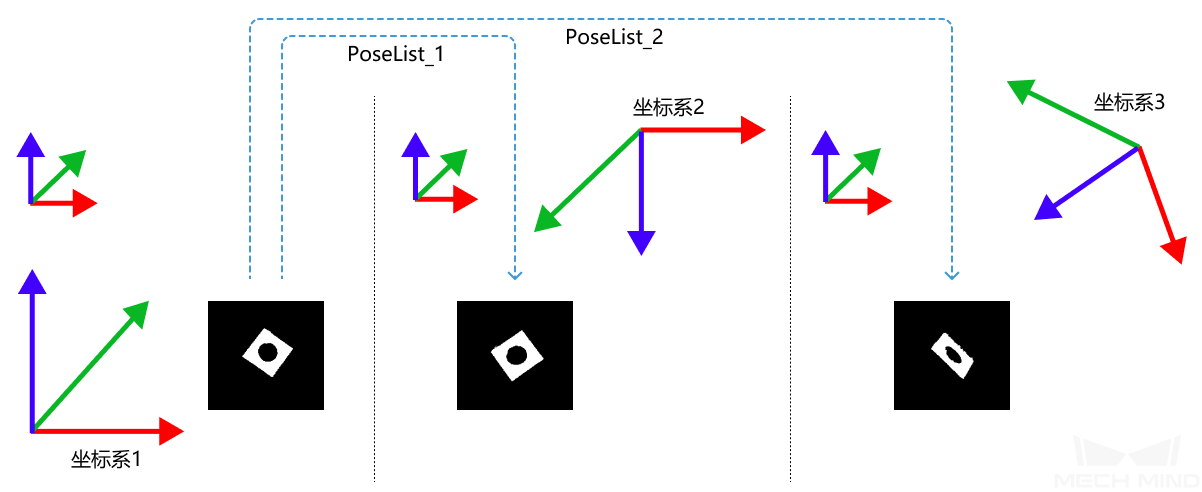
FirstWithAll: 使用输入的所有参考位姿变换第一个点云,需输入参考位姿列表。具体效果见 调节示例 。
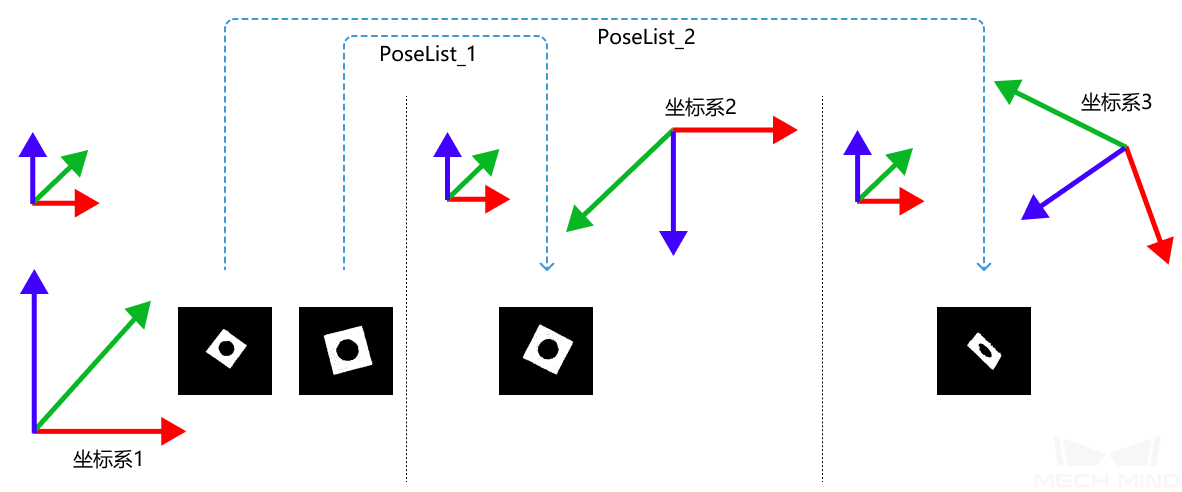
UseCorrespondenceInput:一对一变换,将原始点云转换到参考位姿所在坐标系,需输入参考位姿列表,且输入位姿个数与参考位姿个数相等。具体效果见 调节示例 。
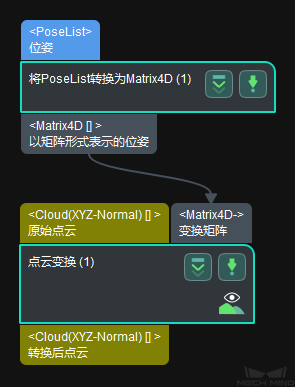
AffineTransform:通过变换矩阵变换点云,可以使用“将 PoseList 转换为 Matrix4D”步骤将 poselist 转为 matrix4D,再输入到本步骤的 Matrix4D 输入端口中。具体效果见 调节示例 。