开始
应用指南
软件使用指南
机器人通信配置指南
更多支持
附录
注解
该步骤的内容正在维护中。如果你急需了解该步骤的更多信息,请联系我们(docs@mech-mind.net)。
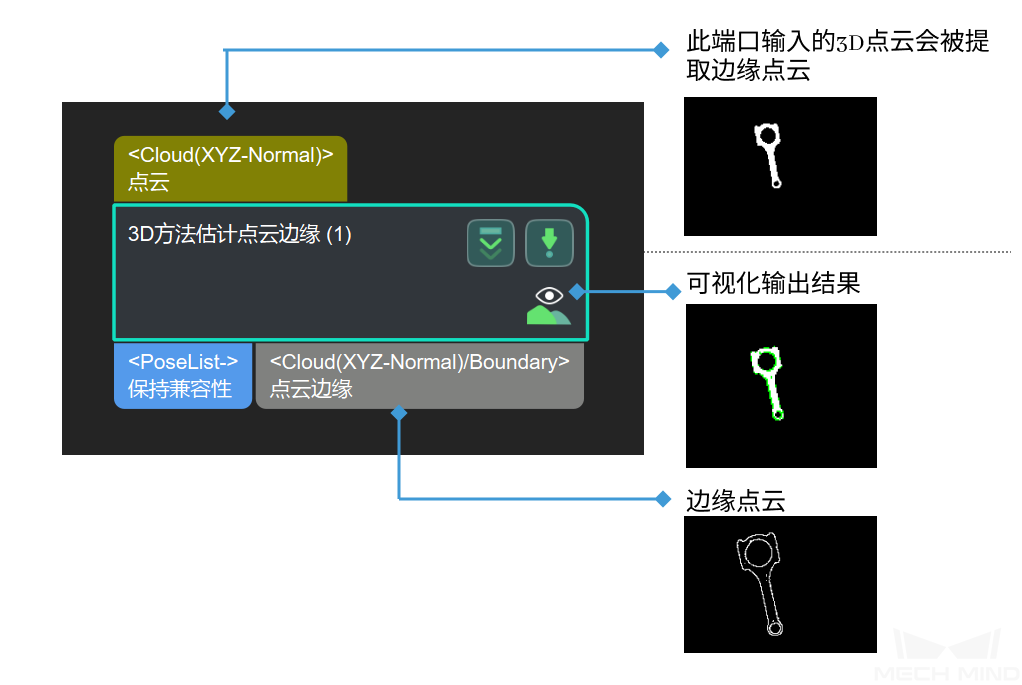
提取 3D 点云的边缘。
通常用于使用点云边缘进行匹配,比使用全部点云的匹配速度更快。