툴바¶
Mech-Center 툴바에는 구성 설정, Mech-Viz/Vision 실행, 카메라 뷰어 실행, 실행, 인터페이스 실행, 마스터 컨트롤 로봇 및 관리자의 7개 버튼이 있습니다.
구성 설정¶
구성 설정은 Mech-Center의 기본 설정, 각 소프트웨어의 경로를 설정, 자동으로 로드된 프로젝트 경로 확인 및 외부 서비스 선택 등 기능을 실현할 수 있습니다.
선호 설정¶
선호 설정 옵션은 아래 이미지와 같이 소프트웨어의 전역 설정을 개인화하는 데 사용됩니다. 사용자는 선호에 따라 관련 설정을 할 수 있습니다. 예를 들면 소프트웨어 테마 색상 전환, Mech-Center 소프트웨어 인터페이스 언어 전환(현재 소프트웨어는 중국어, 영어, 일본어, 한국어까지 4개 언어 지원), 로그 변경 및 저장 등이 있습니다.
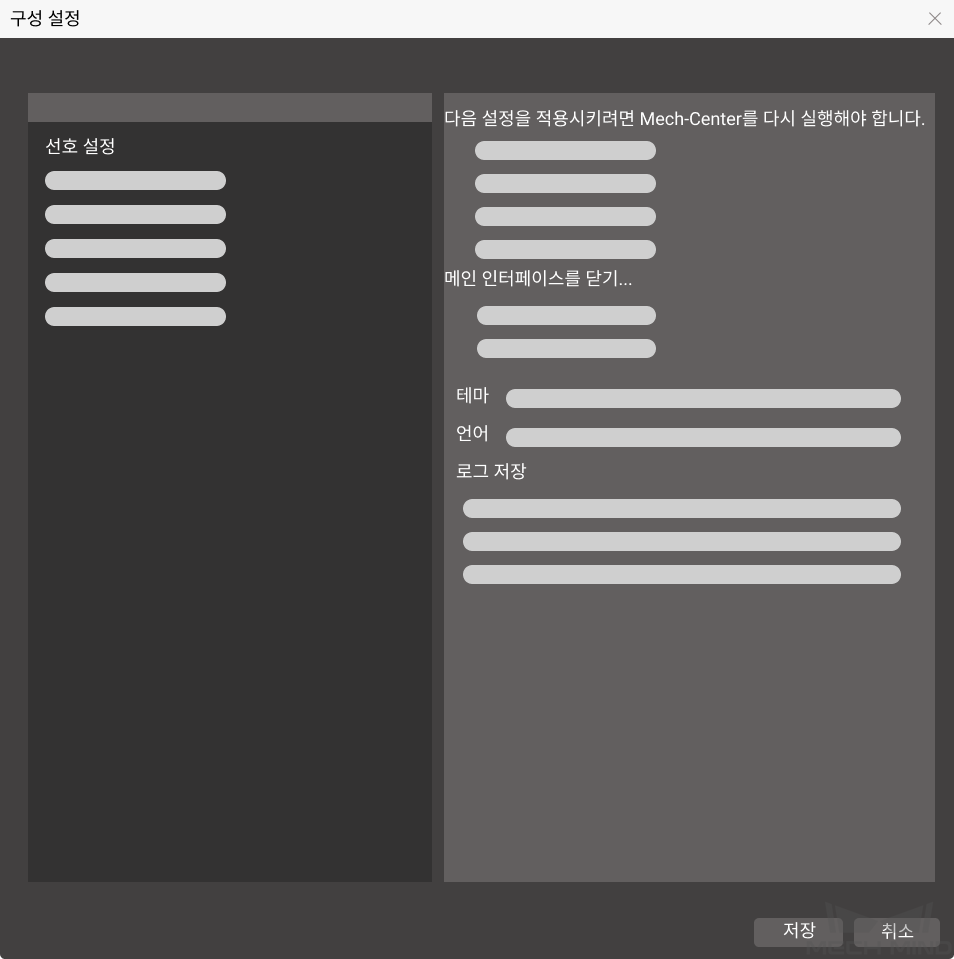
실행 시 콘솔을 숨기기 를 선택하면 Mech-Center 소프트웨어가 실행될 때 콘솔이 숨겨집니다.
PC 부팅 시 Mech-Center 자동으로 실행하기 를 선택하면 Mech-Center 소프트웨어 자동 시작을 실현할 수 있습니다.
Mech-Viz/Mech-Vision/Mech-Interface 자동으로 실행하기 (있으면) 를 선택하면, Mech-Viz/Mech-Vision/Mech-Interface는 Mech-Center 소프트웨어를 시작한 후 자동으로 시작할 수도 있습니다.
Mech-Viz/Mech-Vision 실행한 후 트레이로 최소화하기 를 선택한 후 실행된 Mech-Viz/Mech-Vision 소프트웨어가 바탕 화면 상태 표시줄의 트레이에 숨겨집니다.
주의
변경 사항을 저장하고 Mech-Center를 리부팅해야 설정이 적용됩니다.
Mech-Viz¶
Mech-Viz 옵션은 Mech-Viz 소프트웨어의 열수 있는 경로를 설정하고 자동으로 로드된 프로젝트 경로를 표시하는 데 사용됩니다.아래 그림과 같습니다.
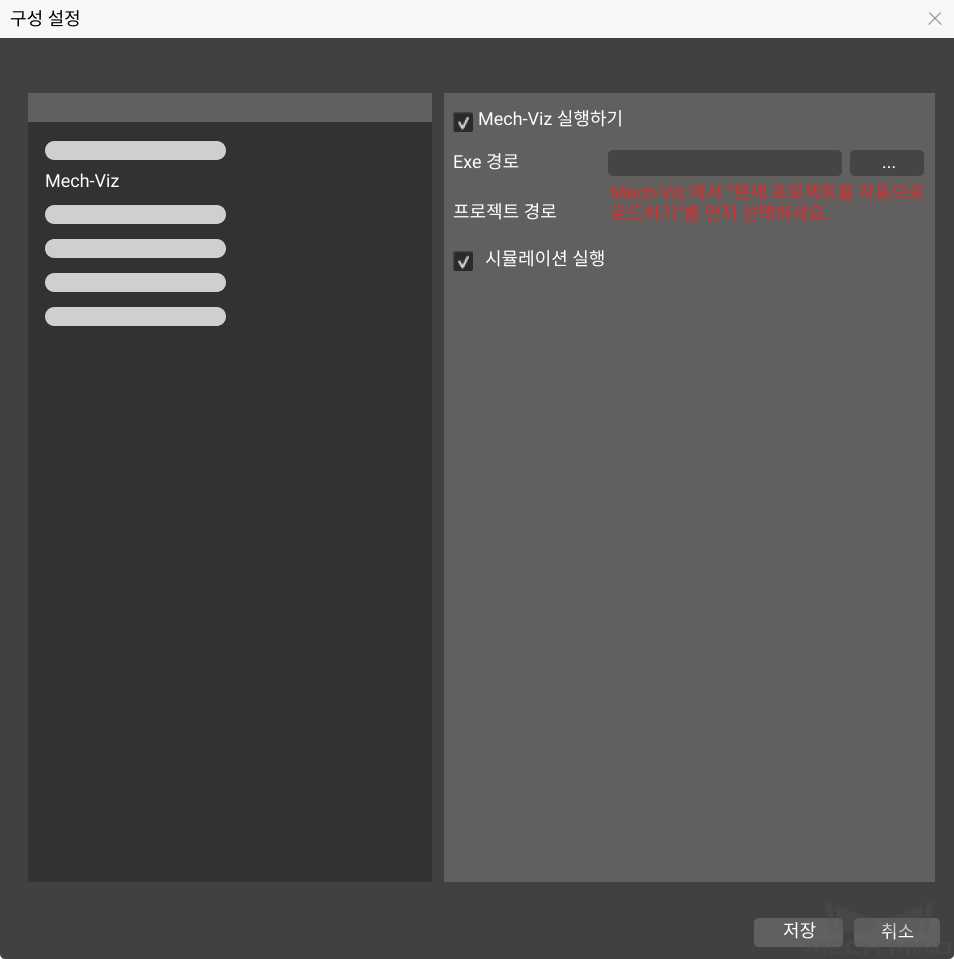
왼쪽의 Mech-Viz 를 클릭하여 설정 인터페이스로 들어가면 Mech-Viz 실행 이 기본적으로 선택되어 있을 것입니다.
프로그램 경로 뒤의 … 를 클릭하고 Mech-Viz 설치 디렉터리에서 mmind_viz.exe 파일을 선택하여 경로 선택을 완료합니다.
Mech-Viz에서 현재 프로젝트를 자동으로 로드하기 를 선택하면 프로젝트 경로가 자동으로 로드되며 수동으로 경로를 추가할 필요가 없습니다.
참고
시뮬레이션 을 선택하면 Mech-Viz 소프트웨어는 실제 로봇을 움직이지 않고 시뮬레이션만 합니다.
Mech-Vision 、Mech-Eye Viewer¶
Mech-Vision, Mech-Eye Viewer 구성 설정 방식은 Mech-Viz와 유사합니다.
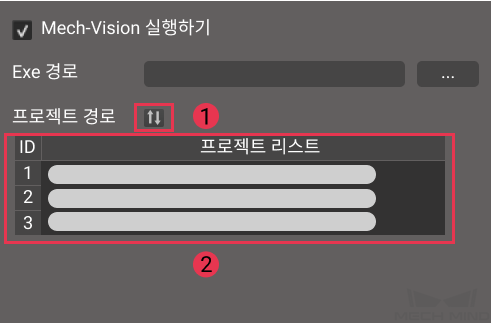
인터페이스에 해당하는 Mech-Vision 프로젝트 ID를 조정하려면 구성 설정의 Mech-Vision 페이지에서 관련 설정을 할 수 있습니다.
먼저 Mech-Vision 소프트웨어에서 현재 프로젝트를 자동으로 로드하기 를 선택한 다음 Mech-Center 구성 설정의 Mech-Vision 페이지에서  를 클릭하여 Mech-Vision 프로젝트 경로 리스트를 동기화해야 합니다. 마지막으로 마우스 왼쪽 버튼으로 프로젝트를 길게 누르고 위 또는 아래로 끌어 프로젝트 경로의 순서를 조정합니다.
를 클릭하여 Mech-Vision 프로젝트 경로 리스트를 동기화해야 합니다. 마지막으로 마우스 왼쪽 버튼으로 프로젝트를 길게 누르고 위 또는 아래로 끌어 프로젝트 경로의 순서를 조정합니다.
Robot Server¶
Robot Server 옵션은 Mech-Viz 소프트웨어의 마스터 컨트롤을 실현하도록 로봇에 적용하는 데 사용됩니다. 아래 그림과 같습니다.
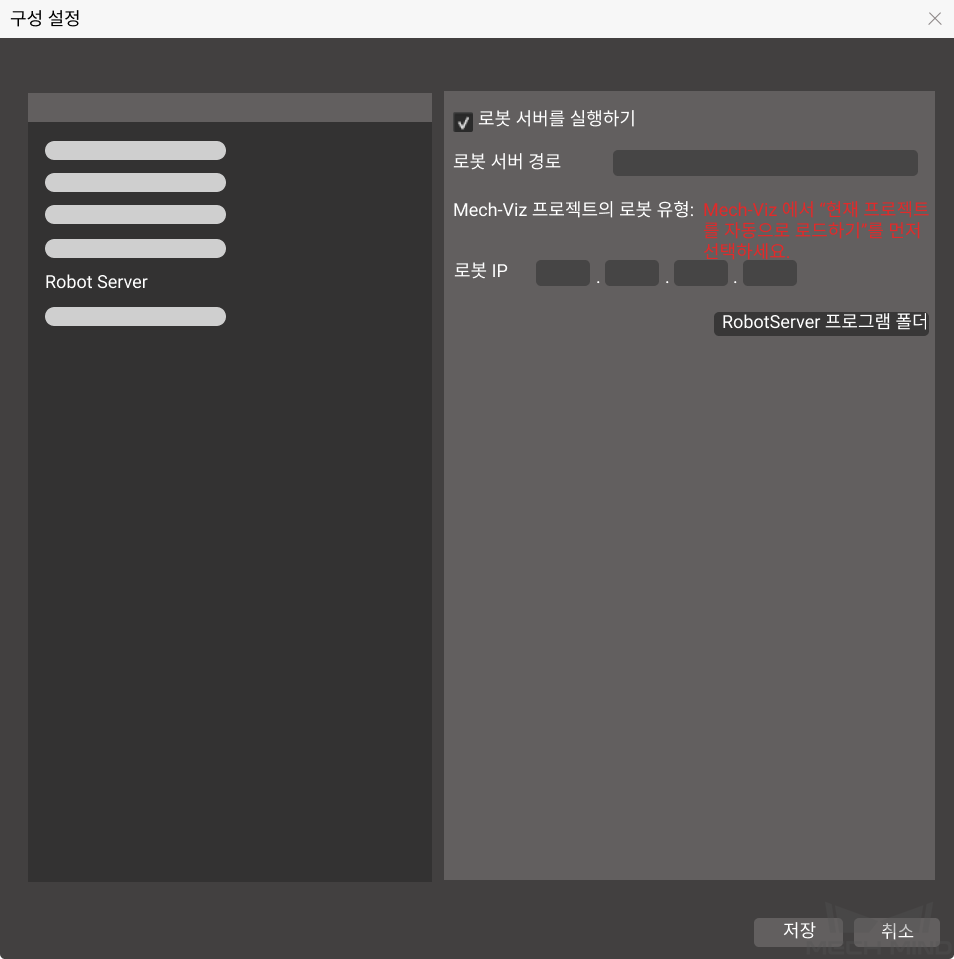
왼쪽의 Robot Server 를 클릭하여 설정 인터페이스로 들어갑니다. Robot Server 실행 은 기본적으로 선택되어 있으며 Mech-Center 와 함께 설치된 Robot Server 경로를 자동으로 로드합니다.
주의
Mech-Viz 프로젝트를 성공적으로 로드하면 Mech-Viz 프로젝트의 로봇 유형이 자동으로 표시되며 입력할 필요가 없습니다. 로봇 IP는 실제 프로젝트의 설정에 따라 입력해야 하며 올바른지 확인해야 합니다.
Mech-Interface¶
Mech-Interface 는 외부 서비스와의 통신을 위한 통합 외부 인터페이스입니다.
Mech-Viz、Mech-Vision 실행하기¶
Mech-Viz/Mech-Vision 소프트웨어가 성공적으로 실행되면 소프트웨어 아이콘과 해당 버전이 서비스 상태 표시줄에 표시됩니다.
주의
버전 호환성 체크는 프로젝트 실행 시 진행되며, Mech-Viz, Mech-Vision, Mech-Center V1.4.0 및 이후 버전에서 사용할 것을 권장합니다.
Mech-Center가 다른 두 소프트웨어 버전이 1.4.0보다 낮은 것을 발견하면 버전이 1.4.0보다 높아야 한다는 메시지가 표시되고 실행 을 클릭하면 오류 알림이 나타납니다.
카메라 뷰어 실행¶
Mech-Eye Viewer 소프트웨어가 성공적으로 실행되면 소프트웨어 아이콘이 바탕 화면 상태 표시줄에 나타납니다.
실행¶
Mech-Viz 및 Mech-Vision에 로드된 프로젝트를 실행합니다.
인터페이스 실행¶
Mech-Interface 실행하기.
로봇 마스터 컨트롤¶
실제 로봇이 성공적으로 연결되면 로봇 아이콘과 해당 모델이 서비스 상태 표시줄에 표시됩니다.
관리자¶
Mech-Center에는 관리자와 오퍼레이더 이 두 가지 모드가 있으며 일반적으로 관리자 모드로 선택되어 있습니다. 오퍼레이터 모드를 사용하는 경우 프로젝트 편집 및 구성 수정이 불가능하며 아이콘이 오퍼레이터 모드로 표시됩니다. 모드를 전환하려면 아이콘을 클릭하고 로그인 대화 상자에서 사용자 유형을 선택한 다음 로그인 을 클릭하십시오.
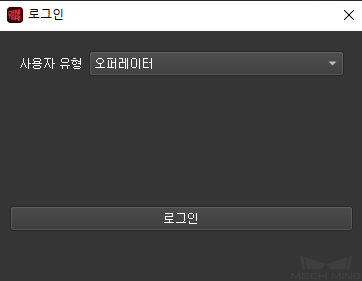
관리자 모드는 로그인 비밀번호가 필요하며, 비밀번호 수정이 필요한 경우 메뉴바의 에서 수정할 수 있습니다.