通信方式の選択¶
実際に設定する際に、通常は事前にプロジェクトの機能要件、通信対象と通信プロトコルを揃う必要があります。その内容に基づいて通信方式を選択します。
下図は通信方式の選択流れになります。
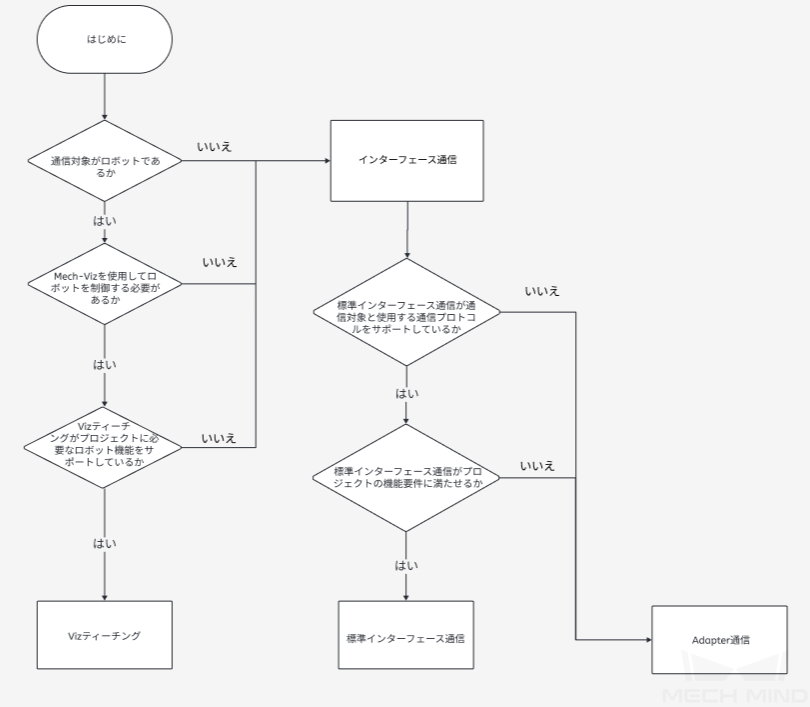
通信方式を選択する際に、まずVizティーチング通信かインターフェース通信かを確認します。 インターフェース通信を使用する場合は、さらに標準インターフェース通信か、もしくはAdapter通信を使用するかを確認します。
Vizティーチング通信を使用するか、インターフェース通信を使用するかの判断流れは以下の通りです。
通信対象がロボットであるかどうかを確認します。
「はい」の場合、次の項目を確認します。
「いいえ」の場合、インターフェース通信を使用します。
プロジェクトでMech-Vizを使用してロボットを制御する必要があるかどうかを判断します。
「はい」の場合、次の項目を確認します。
「いいえ」の場合、インターフェース通信を使用します。
衝突後に元の経路に戻すなど、Vizティーチング通信方式がプロジェクトに必要なロボット機能をサポートしているかどうかを判断します。
「はい」の場合、Vizティーチング通信を使用します。
「いいえ」の場合、インターフェース通信を使用します。
標準インターフェース通信を使用するか、Adapter通信を使用するかの判断流れは以下の通りです。
標準インターフェース通信が、通信対象と使用する通信プロトコルをサポートしているかどうかを確認します。
「はい」の場合、次の項目を確認します。
「いいえ」の場合、Adapter通信を使用します。
標準インターフェース通信がプロジェクトの機能要件に満たせるかどうかを確認します。
「はい」の場合、標準インターフェース通信を使用します。
「いいえ」の場合、Adapter通信を使用します。