単一の段ボール箱を把持+単一吸着の正方形吸盤¶
調整可能なパラメータは下図に示します。
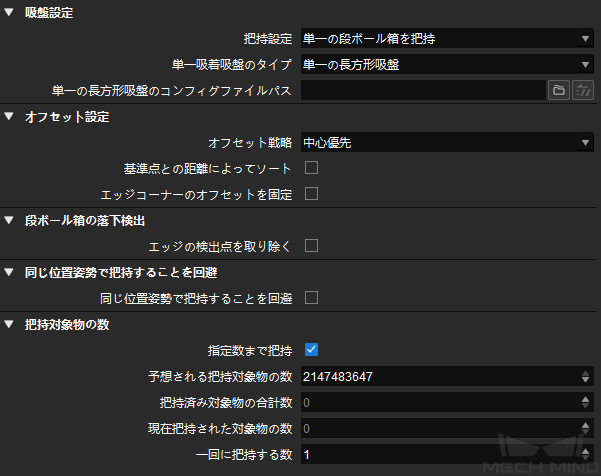
吸盤設定
- 単一の長方形吸盤のコンフィグファイルパス
 をクリックして吸盤のコンフィグファイルを選択します。吸盤コンフィグレータ を使用して吸盤を設定し、jsonファイルをエクスポートすることができます。
をクリックして吸盤のコンフィグファイルを選択します。吸盤コンフィグレータ を使用して吸盤を設定し、jsonファイルをエクスポートすることができます。
オフセット設定
- オフセット戦略
- 中心優先:オフセットがない(吸盤の中心と箱の中心が重なる)位置姿勢を優先に試行します。失敗したらオフセットがある(中心が外れる)位置姿勢を試行すます。コーナー優先:オフセットのない位置姿勢を最後に試行します。コーナーだけ:オフセットのない位置姿勢を試行しません。中心優先 を選択すれば衝突を回避できるので混載デパレタイジングに適しています。物体を把持してから、コンベアに配置するなど、混載パレタイジングを実行しなければ選択する必要はありません。
- 基準点との距離によってソート‐基準点X/Y座標
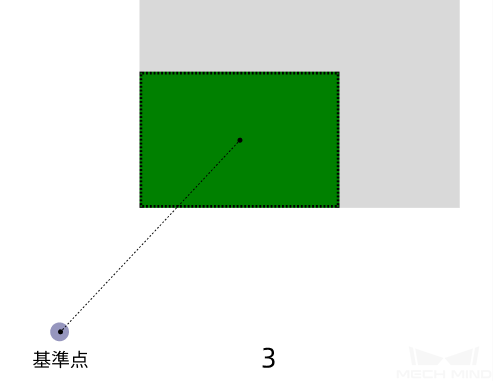
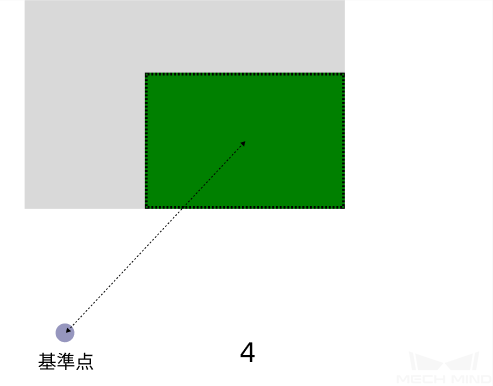
- 調整説明:このパラメータを使用するには、基準点座標を設定する必要があります。把持を計画する際に、ツールを基準点に近づけるように経路を計画します。ただし、対象物の対称性と同時に設定することはできません。調整の例:下図(上面図)では、緑色の部分は箱で、灰色の部分は単一吸着の吸盤です。この場合に、四つの把持方法があります。
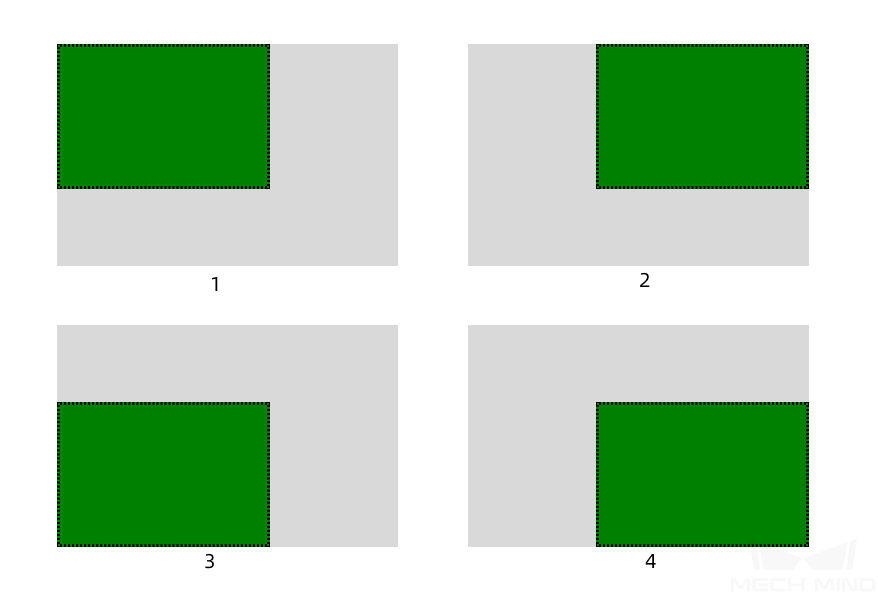 基準点を箱の左下隅に設定します。基準点と箱の相対位置は固定されており、把持を計画する時に、ツールが基準点に近い位置を優先に試行します。従って下図に示すように、優先試行の順序は: 。
基準点を箱の左下隅に設定します。基準点と箱の相対位置は固定されており、把持を計画する時に、ツールが基準点に近い位置を優先に試行します。従って下図に示すように、優先試行の順序は: 。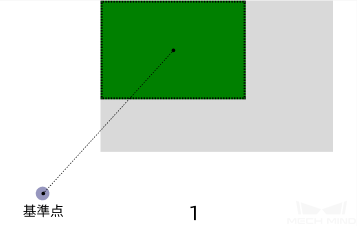
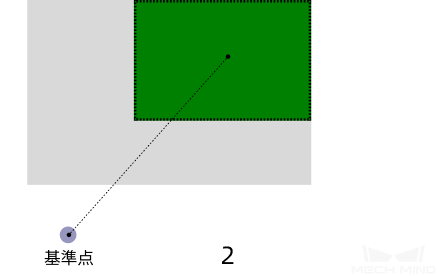
- 優先度の高いオフセットのみを保持‐計画解の最大数
- 調整説明:初期値は2です。基準点の計画回数に応じて設定します。調整の例:上記の例では、このパラメータの値を2に設定したら、2と1のみを保持します。
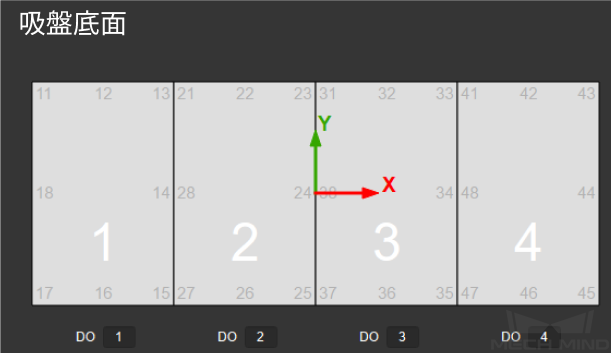
- エッジコーナーのオフセットを固定‐エッジコーナーのラベル番号
- 吸盤の番号を入力します。吸盤エッジコーナーの番号付けルール:吸盤の番号は0~8の数字を使います。0は中心点、1、3、5、7はコーナー、2、4、6、8はエッジの番号です。吸盤のパーティション番号と吸盤の番号の組合せは、エッジコーナーの番号になります。
同じ位置姿勢で把持することを回避
このパラメータは、把持に失敗した場合に、同じ場所で再び失敗することを回避するために使用されます。
- 優先度を減少する範囲の半径上限
- 初期値:0。調整説明:位置姿勢が前回の把持位置姿勢との直線距離がこの値より小さければ、前回の把持位置姿勢とは同じ位置姿勢と判断し、把持の優先度を下げます。
- 破棄する範囲の半径上限
- 初期値:0。調整説明:位置姿勢が前回の把持位置姿勢との直線距離がこの値より小さければ、この位置姿勢を破棄します。応用事例:クランクシャフトを一つ把持するとき、もし初回の試行が失敗し、そのクランクシャフトを動かして位置が変わったら、次回の把持では成功する可能性があります。したがって、 優先度を減少する範囲の半径上限 を使用して優先度を下げますが、破棄はしません。もし試行が失敗し、かつそのクランクシャフトの位置が変わらなかったら、二回目の把持でも成功することはありません。この場合に無駄な動作を回避するために 破棄する範囲の半径上限 を使用してこの位置姿勢を破棄します。
- 回避リストの最大長さ
- 初期値:1。調整説明:把持を実行する時に回避する対象物(対象物の位置姿勢または対象物)の数の最大値。応用事例:パラメータの値を2に設定し、Mech-Vision により3つの位置姿勢を出力するとします。位置姿勢1の把持に失敗して記録します。位置姿勢2の把持に失敗して記録します。位置姿勢3の把持に失敗して記録します。このとき、位置姿勢1は破棄され、2と3の記録だけが残ります。
- 回避の対象
- 対象物の位置姿勢:把持対象物の位置姿勢を記録します。対象物に3つの把持点があり、その中に一つの位置姿勢が記録されたら、残りの2つの位置姿勢は未試行とされます。対象物:把持対象物を記録します。対象物のある把持点を試行したら、次回に試行するときにこの対象物の全ての把持点を試行したと見いだされてこの物を優先に把持しません。
把持対象物の数
此参数组用于抓取计数,并自动计算剩余的抓取数量。如 目标抓取数量 中输入订单数量,即可实现订单抓取数量计数与订单剩余数量自动计算。
- 予想される把持対象物の数
把持する対象物の最大値。
- 把持済み対象物の合計数
把持した対象物の合計数です。ソフトウェアでは自動的に計算するので、手動で変更することはできません。
- 現在把持された対象物の数
現在ロボットが把持した対象物の数です。ソフトウェアでは自動的に計算するので、手動で変更することはできません。