ロボットモデルを追加してロボット実機を接続¶
ロボット実機を接続するには、Mech-Vizでプロジェクトを新規作成してロボットモデルを読み込む必要があります。また、ロボット型番に応じたソフトウェアとロボット実機間の通信を作成する必要があります。Mech-Vizは、Mech-Mind株式会社が独自開発した新世代の知能ロボットプログラミングソフトウェアです。可視化されたノーコードのプログラミングインターフェイスにより、ワンクリックでシミュレーションを実行できます。経路計画、衝突検出などの知能アルゴリズムが搭載され、世界の様々な主流メーカーのロボットに対応しています。
注意
V1.6.0バージョンのMech-Vizは主要メーカーのロボットインストールパッケージのみを統合します。他のロボットは、 オンラインロボットライブラリ からダウンロードしてインポートします。
本例で使用されたUR_3ロボットはソフトウェアに含まれていません。下図に示すように、最初に対応するロボットファイルをダウンロードしてソフトウェアにインポートして、ロボットライブラリでそれを選択する必要があります。
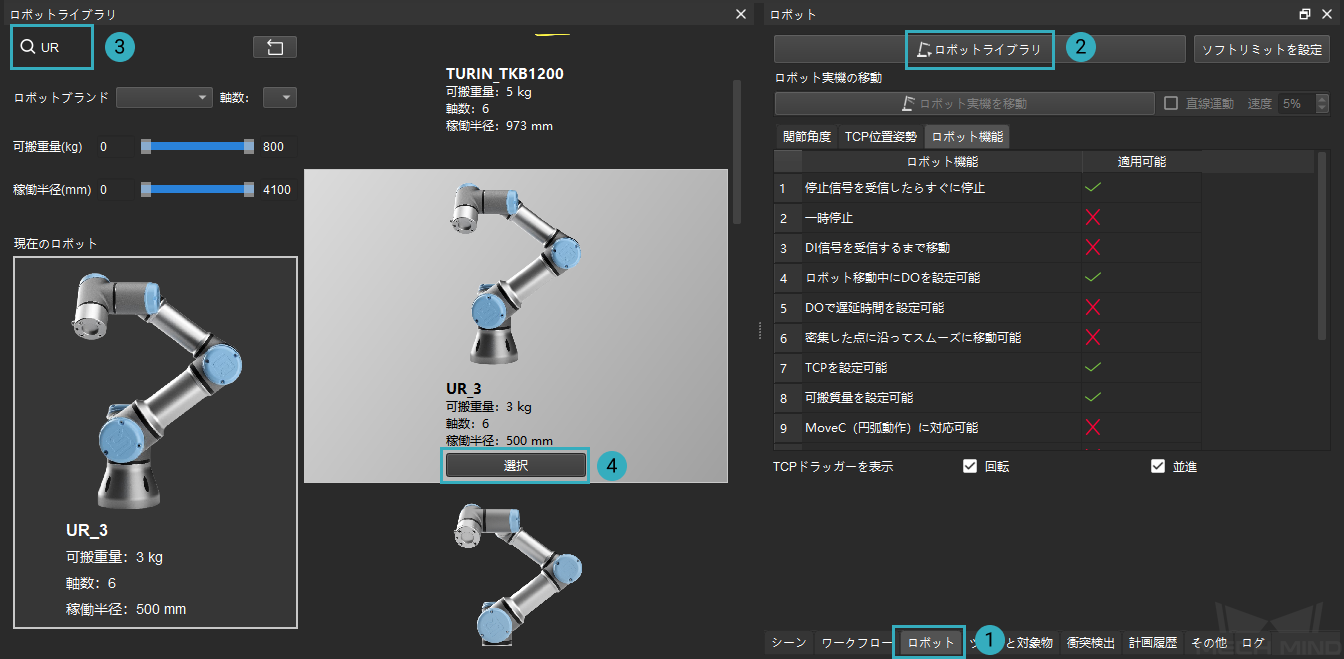 ① 「ロボット」パネルに切り替えます。② ロボットライブラリ をクリックします。③ ロボット型番を検索します。④ ロボットを選択します。
① 「ロボット」パネルに切り替えます。② ロボットライブラリ をクリックします。③ ロボット型番を検索します。④ ロボットを選択します。をクリックして、プロジェクトをローカルに保存します。
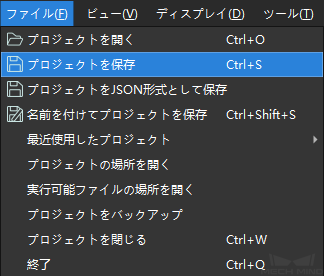
ツールバーの
 にチェックを入れます。
にチェックを入れます。Mech-Centerのインターフェイスで
 をクリックします。
をクリックします。Mech-Centerのログに ロボットが接続されました のメッセージが表示され、サービスステータスバーに
 が表示された場合、ロボット実機が正常に接続されました。
が表示された場合、ロボット実機が正常に接続されました。
注意
データの損失を防ぐために、プロジェクトを保存することにご注意ください。