ツールバー¶
ツールバーには、「設定」、「起動」、「Mech-Eye Viewerを起動」、「実行」、「インターフェイスサービスを起動」、「ロボットを制御」、「管理員」という7つのボタンがあります。
設定¶
これは、Mech-Centerの基本設定を実装し、各ソフトウェアのパスを設定し、自動的に読み込まれたプロジェクトパスを表示し、外部サービスを選択するために使用されます。
外観と動作¶
下図に示すように、「外観と動作」の設定画面は、ユーザーが自分の好みに合わせて設定することができます。例えば、ソフトウェアのテーマ、ソフトウェアの表示言語を切り替えることができます(現在は、中国語、英語、日本語、韓国語の4つの言語に対応します)。また、ログ保存の関連設定などを変更できます。
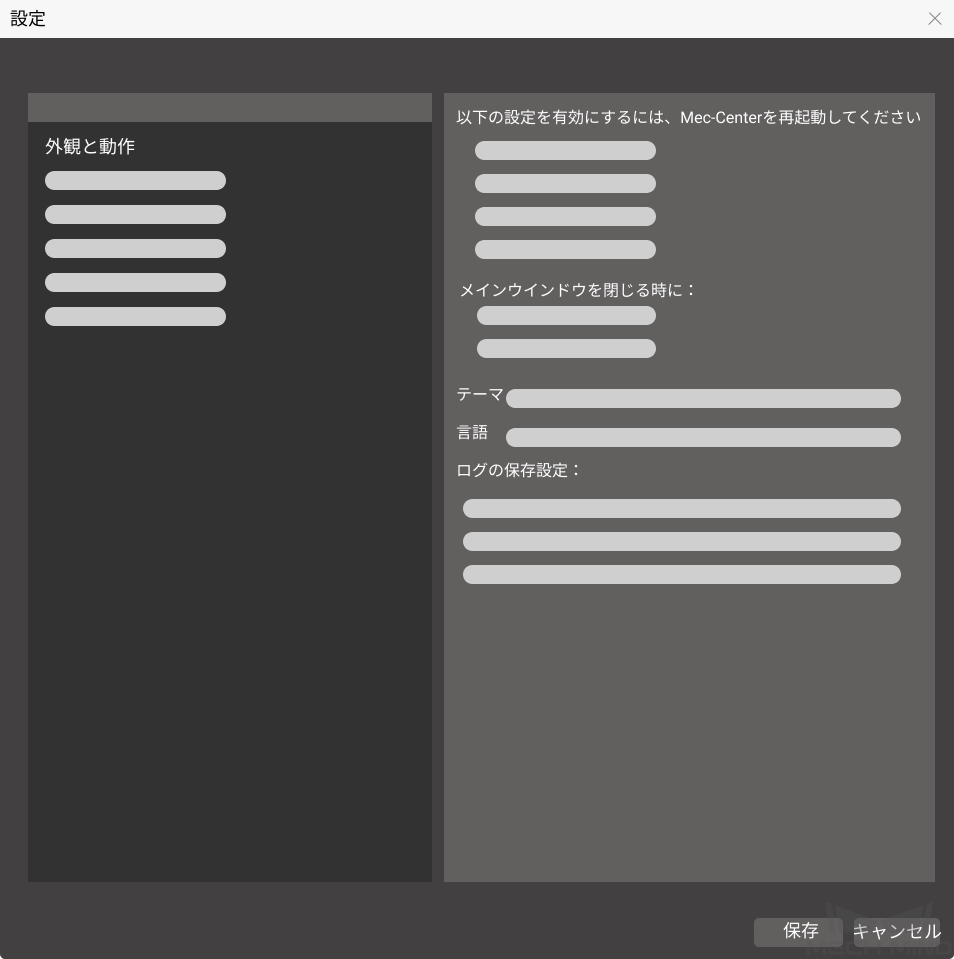
実行中にコンソールを非表示 のチェックを入れれば、Mech-Centerを起動したら、コンソールが非表示になります。
PC起動時にMech-Centerを自動的に実行 にチェックを入れれば、コンピュータを起動すると、Mech-Centerも自動的に起動します。
Mech-Viz/Mech-Vision/Mech-Interfaceを自動的に起動(もしあれば) にチェックを入れれば、Mech-Centerを起動すると、Mech-Viz/Mech-Vision/Mech-Interfaceも自動的に起動します。
Mech-Viz/Mech-Visionを起動するときにシステムトレイに最小化 にチェックを入れれば、起動したMech-Viz/Mech-Visionがデスクトップステータスバーのトレイに非表示になります。
注意
変更を保存してMech-Centerを再起動してから、設定が有効になります。
Mech-Viz¶
下図に示すように、これはMech-Vizのexeパスを設定し、読み込まれたプロジェクトのパスを自動的に表示するために使用されます。
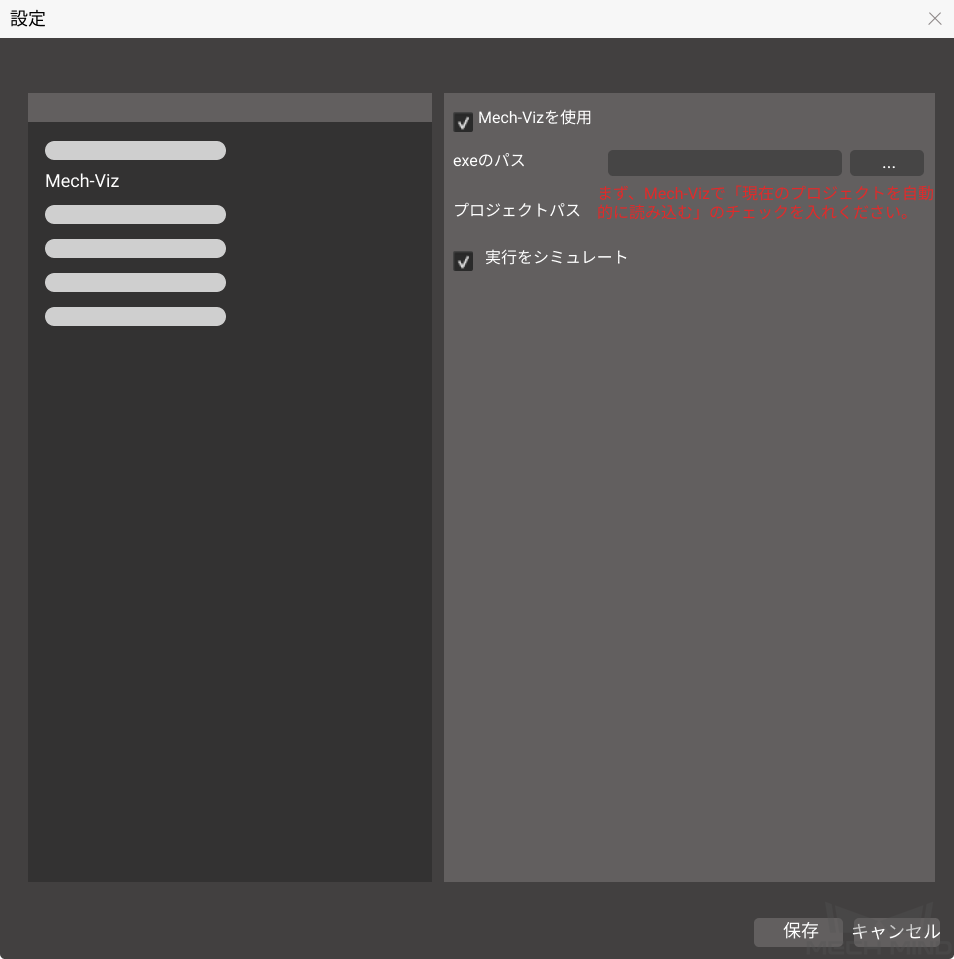
Mech-Viz をクリックして設定画面に入り、 Mech-Vizを使用 のチェックがデフォルトで入れられます。
パスの後にある ... をクリックし、Mech-Vizインストールディレクトリの下のmmind_viz.exeを選択したら、パス選択は完了します。
Mech-Vizソフトウェアで 現在のプロジェクトを自動的に読み込む のチェックを入れれば、プロジェクトパスは自動的に読み込まれるので、手動で入力する必要はありません。
注釈
実行をシミュレート にチェックを入れれば、Mech-Vizはロボット実機をシミュレートするだけで、それを移動させることはません。
Mech-Vision 、Mech-Eye Viewer¶
Mech-Vision、Mech-Eye Viewerの設定は、Mech-Vizとほぼ同じです。
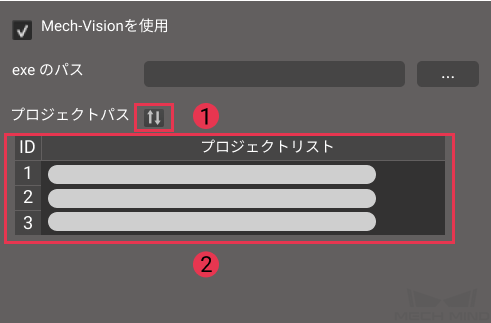
インターフェイスが対応するMech-VisionプロジェクトIDを調整する場合、「設定」の「Mech-Vision」画面で設定してください。
まずは、Mech-Visionソフトウェアで 現在のプロジェクトを自動的に読み込む にチェックを入れます。次に、Mech-Centerの「設定」の「Mech-Vision」画面で  をクリックし、Mech-Visionのプロジェクトパスリストを同期します。最後に、マウスの左ボタンでプロジェクトを押したまま、上または下にドラッグしてプロジェクトパスの順序を調整します。
をクリックし、Mech-Visionのプロジェクトパスリストを同期します。最後に、マウスの左ボタンでプロジェクトを押したまま、上または下にドラッグしてプロジェクトパスの順序を調整します。
Robot Server¶
下図に示すように、Mech-Vizソフトウェアのフルコントロールを実現できるようにロボットを適合させるために使用されます。
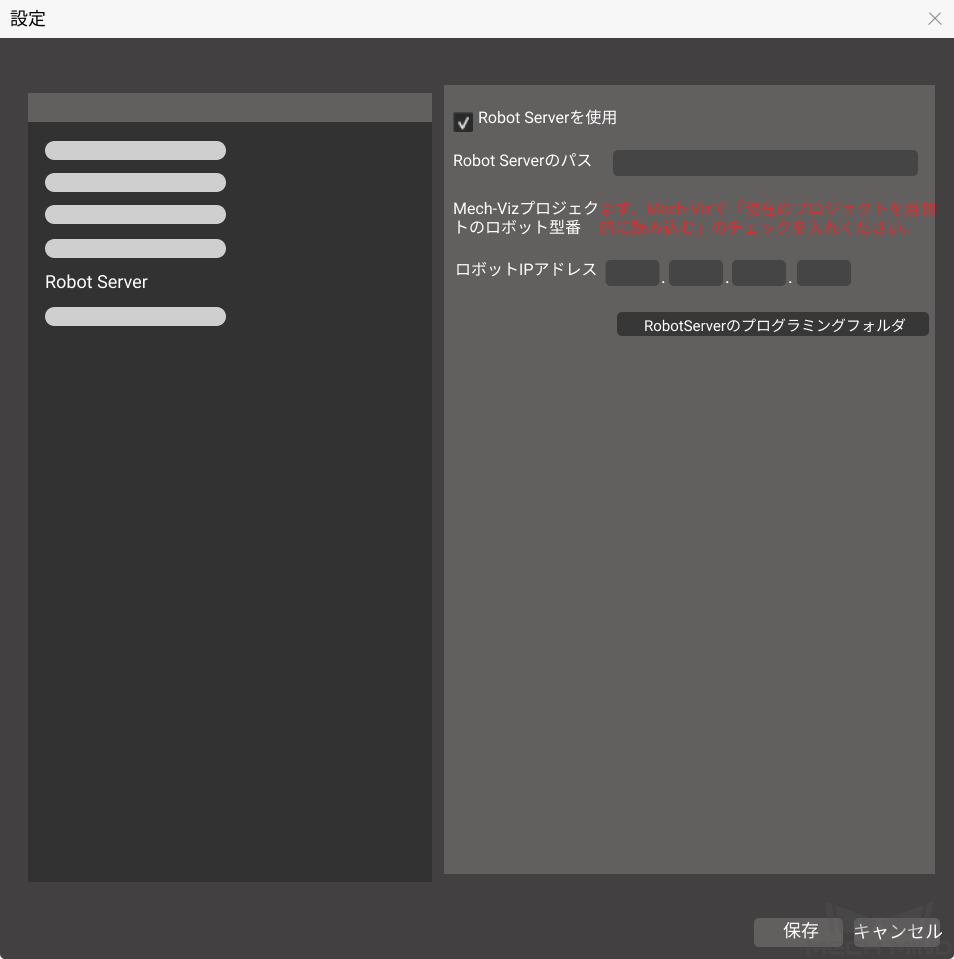
Robot Server をクリックして設定画面に入ります。 Robot Serverを使用 にチェックはデフォルトで入れられます。Mech-Centerと共にインストールされたRobot Serverパスも自動的に読み込まれます。
注意
Mech-Vizプロジェクトが正常に読み込まれた後、Mech-Vizプロジェクトのロボット型番は自動的に表示されるので、入力する必要はありません。実際のプロジェクトに応じて、ロボットIPアドレスを正しく入力する必要があります。
Mech-Interface¶
Mech-Interface は第三者との通信を実現するための統一された外部インターフェイスです。
起動¶
Mech-Viz/Mech-Visionソフトウェアが正常に起動すると、ソフトウェアアイコンがサービスステータスバーに表示されます。
注意
プロジェクトの実行時にバージョン互換性チェックが実行されます。バージョンV1.4.0以降のMech-Viz、Mech-VisionおよびMech-Centerを併用することをお勧めします。
Mech-Centerが他の2つのソフトウェアバージョンが1.4.0よりも低いことを検出すると、バージョンは1.4.0より高くなければならないことを表すプロンプトが表示されます。 実行 をクリックすると、エラーメッセージボックスがポップアップ表示されます。
Mech-Eye Viewerを起動¶
Mech-Eye Viewerソフトウェアが正常に起動すると、ソフトウェアアイコンがデスクトップのステータスバーに表示されます。
実行¶
Mech-VizおよびMech-Visionで読み込まれたプロジェクトを実行します。
インターフェイスサービスを起動¶
Mech-Interface を起動します。
ロボットを制御¶
ロボット実機が正常に接続すると、ロボットのアイコンおよびその型番はサービスステータスバーに表示されます。
管理者¶
Mech-Centerには、「管理者」と「操作員」の2つのモードがあり、デフォルトでは「管理者」になります。「操作員」モードに設定すれば、ユーザーがプロジェクトの編集や設定変更を行うことができません。切り替えたい場合、アイコンをクリックし、ダイアログボックスでユーザータイプを選択し、 サインイン をクリックしてください。
「管理者」に切り替える場合、パスワードが必要です。パスワードを変更する場合はメニューバーで を選択し、パスワードを変更します。