开始你的第一个应用
软件使用指南
机器人通讯配置指南
应用指南
附录
功能描述
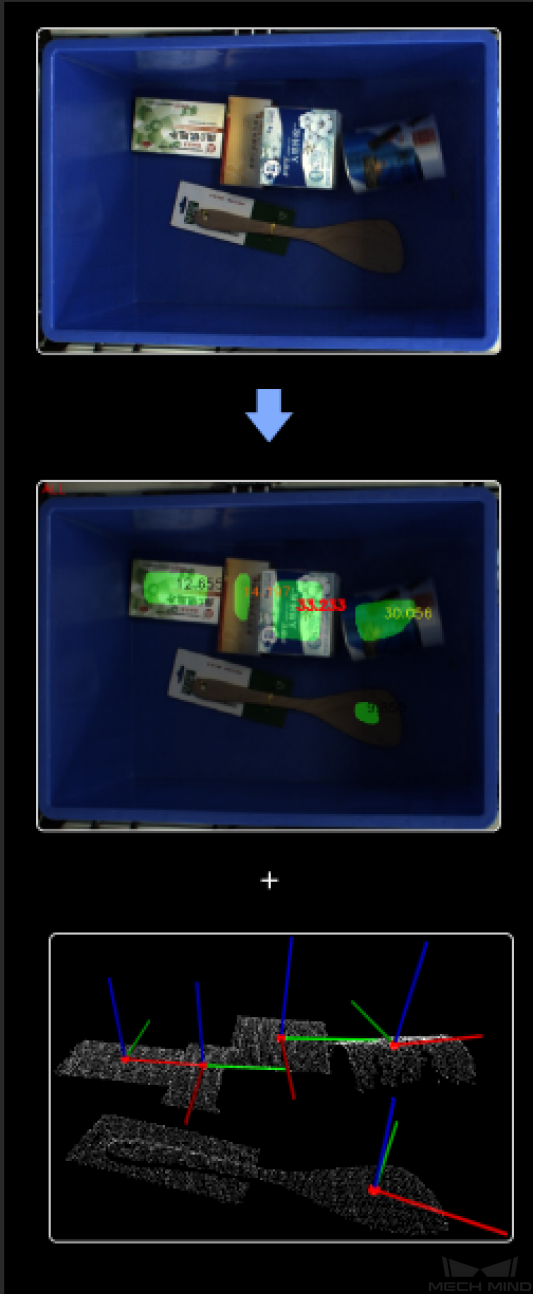
结合2D图像和3D深度图,识别出图像中可被抓取的物体并输出相应的抓取位姿。
使用场景
此步骤通常用于散乱堆叠的不同物品的分拣。
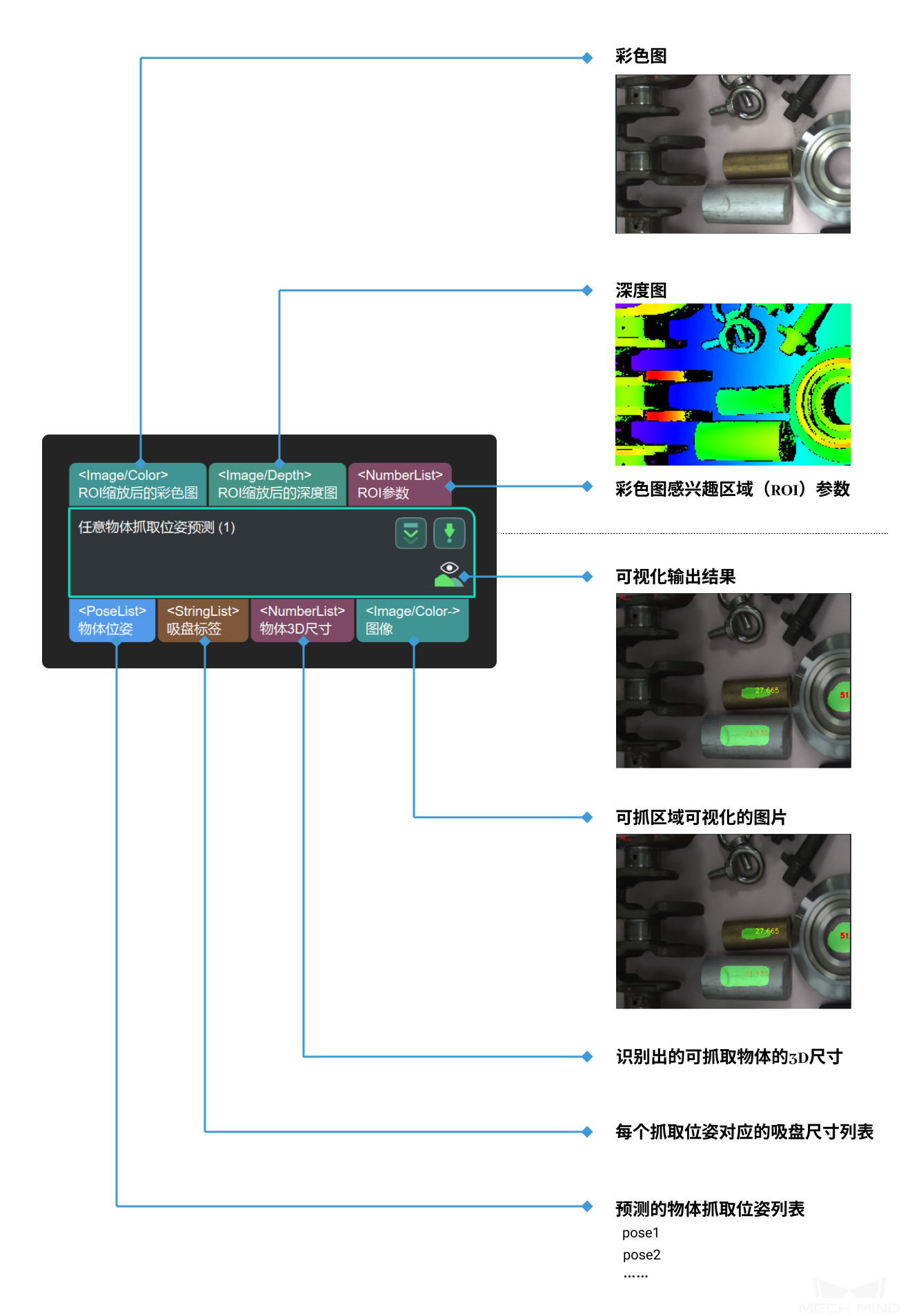
输入与输出