Camera Configuration¶
The interface for camera configuration is as shown below.
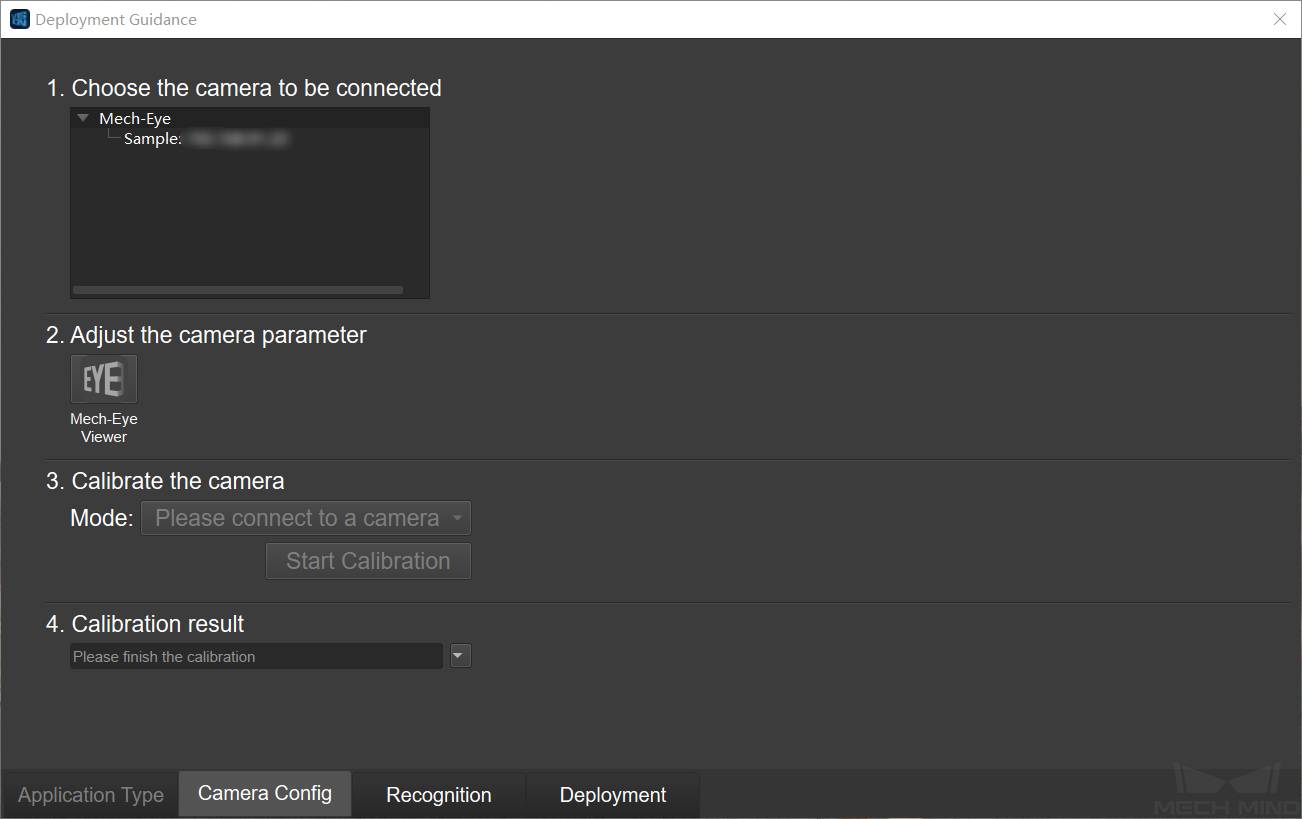
Select the camera to connect:
Double-click the camera to be connected in the camera list, and the remaining steps can be activated after the connection is successful.
Adjust camera parameters:
Adjust camera parameters via Mech-Eye Viewer. For more information on camera parameter adjustments, please refer to Parameter Adjustment.
Calibrate the camera:
Click the drop-down menu to select Mech-Vision Auto or Teach Pendant mode.
Mech-Vision Auto mode requires connecting to the robot. Click ? to view the operation prompts. Please connect the robot according to the prompts.
Click on Start Calibration and follow the prompts to complete the calibration. Please refer to Hand-Eye Calibration Guide for more information about calibration.
Calibration result:
The corresponding folder saving the extrinsic parameters is automatically selected, and no manual processing is required.