DOBOT(越疆)¶
本节介绍如何主控 DOBOT 机器人。
检查控制器及软件版本¶
控制器软件版本为 3.5.2 或以上。
梅卡曼德软件系统版本为 1.6.0 或以上。
设置网络连接¶
配置 IP¶
工控机 IP 需与机器人 IP 位于同一网段,即两者 IP 地址的网络部分和子网掩码需相同,例如 192.168.100.2/255.255.255.0 和 192.168.100.3/255.255.255.0 位于同一网段。
在 DobotSCStudio 中,依次点击 。
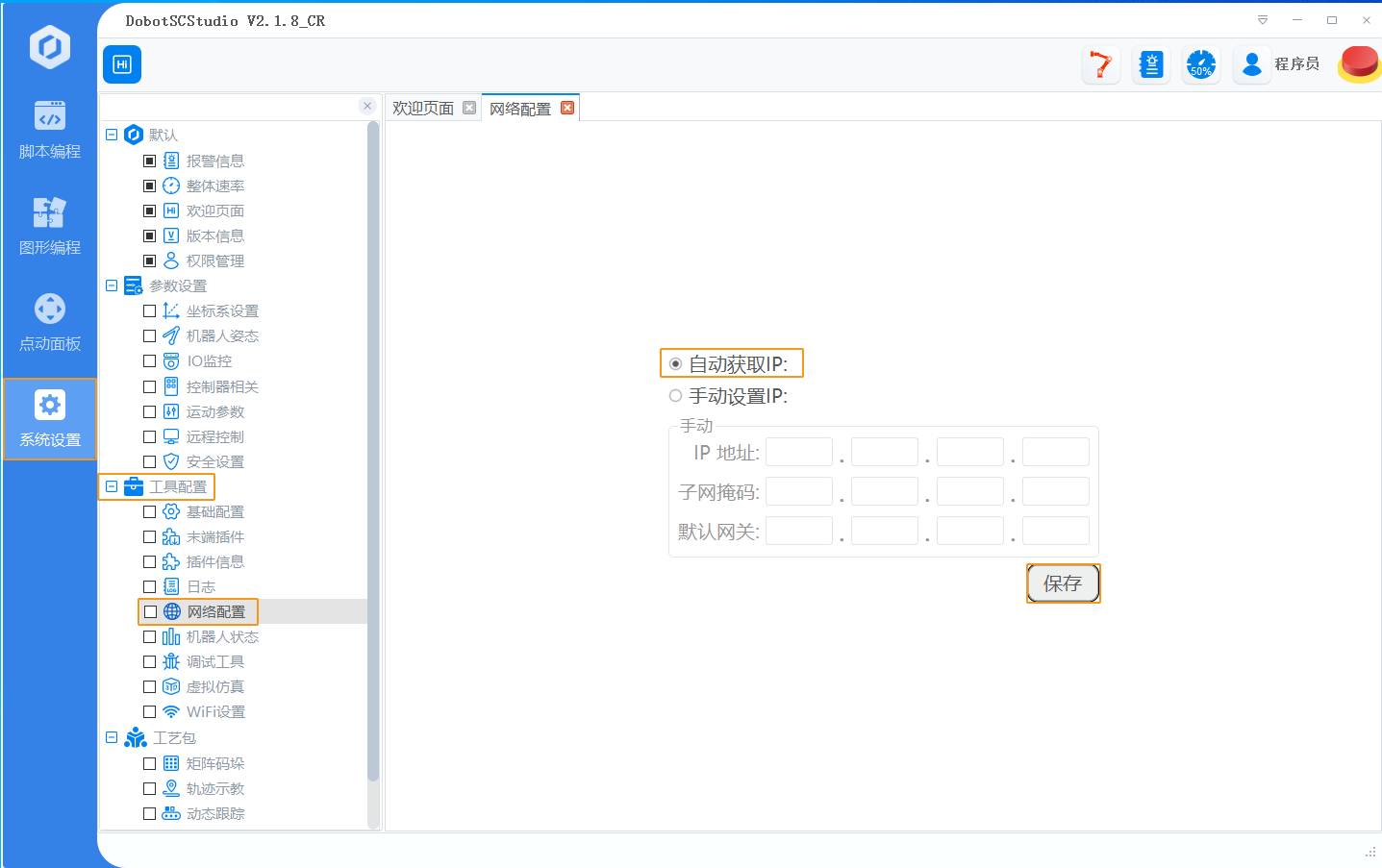
注意
若机器人 IP 与工控机 IP 不在同一网段,选择 手动设置 IP 以手动设置机器人 IP,然后进行保存。
注意事项¶
请勿同时使用 Mech-Viz 和 DobotSCStudio。否则,Mech-Viz 可能无法与机器人通信。
请勿同时使用 Mech-Viz 和示教器操作机器人。
在主控 DOBOT 机器人时,Mech-Viz 中的 TCP 值不能同步到机器人。此时需要先手动修改机器人端的 TCP 值,然后使能机器人,再通过 Mech-Center 重新连接机器人,才能保证 Mech-Viz 和机器人端的 TCP 值一致。若未进行上述操作,则会出现位姿异常错误。