连接工控机网线与设置 IP 地址¶
软件安装完成后,再将网线插入工控机 LAN 口,并设置相机、工控机与机器人的 IP 地址。以下两对 IP 地址需处于同一网段:
相机与工控机中连接相机的网口
机器人与工控机中连接机器人控制柜的网口
提示
工控机各网口不可设置在同一网段。
请先设置工控机 IP 地址,再设置相机 IP 地址与机器人 IP 地址,以防工控机 IP 地址设置不成功。
网口不足时,可使用千兆交换机。
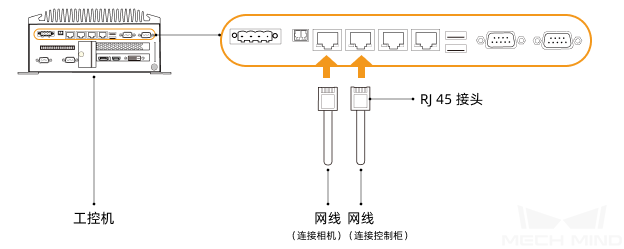
连接网线与设置 IP 地址流程为:
将连接相机网线的 RJ45 插头插入工控机 LAN 网口中,请参考 连接网线 。
设置工控机中连接相机网口的 IP 地址,请参考 设置工控机 IP 地址 。
将连接机器人控制柜网线的 RJ45 插头插入工控机 LAN 网口中,请参考 连接网线 。
设置工控机中连接机器人控制柜网口的 IP 地址,请参考 设置工控机 IP 地址 。
设置工控机 IP 地址¶
在工控机中,选择 进入 网络连接 页面。
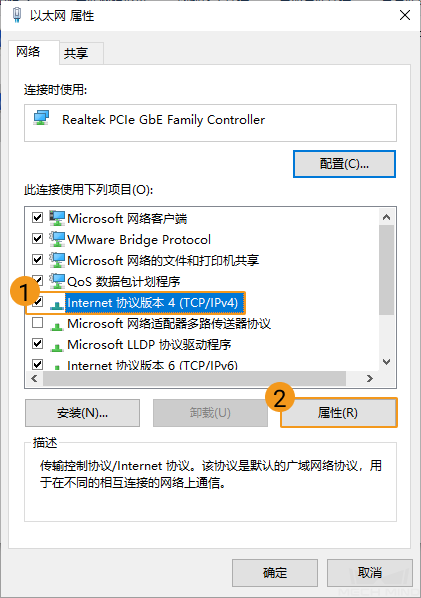
选择相机/机器人连接的网口,右键单击选择 属性 ,进入属性页面。
选择 进入 IP 设置界面。
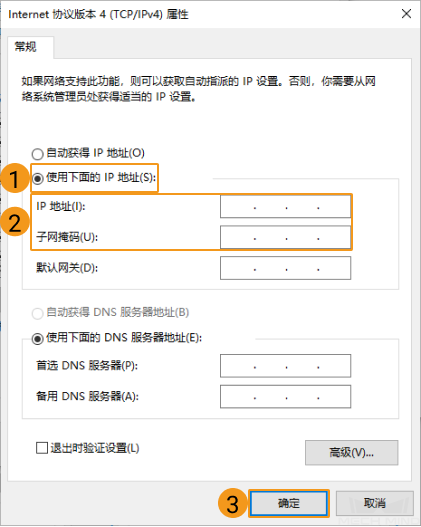
单击 使用下面的 IP 地址 ,然后输入 IP 地址 和 子网掩码 ,单击 确定 ,设置完成。
提示
IP 地址必须唯一。
子网掩码一般为 255.255.255.0 。
提示
推荐重命名与相机和机器人连接的网口,便于识别。在 网络连接 页面中,右键单击需重命名的网口,选择 重命名 ,修改即可。
工控机中的各个网口不可在同一网段,否则可能造成冲突。
设置相机 IP 地址¶
在工控机中,运行 Mech-Eye Viewer。
选中相机,鼠标移动至相机信息栏中,出现
 , 点击进入 IP 设置 界面。
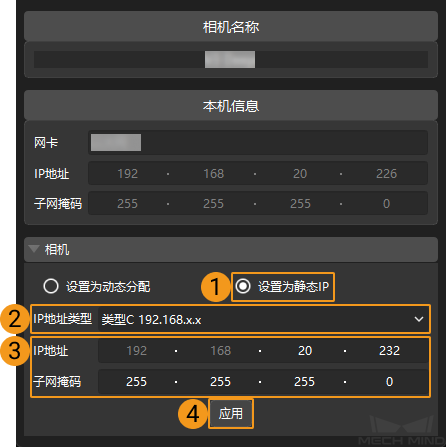
, 点击进入 IP 设置 界面。选择 设置为静态IP,并根据实际情况选择 IP地址类型 。然后,输入相机 IP 地址和子网掩码,并点击 应用 。
提示
IP 地址必须唯一。
在 本机信息 中,可查看与相机相连的工控机网卡的 IP 地址及子网掩码。可根据此处信息设置相机的 IP 地址和子网掩码。
设置机器人 IP 地址¶
查看机器人使用说明书设置机器人 IP 地址。
检查工控机与相机和机器人的网络连通性¶
工控机、相机与机器人的 IP 地址设置完成后,需检查此三者之间的网络连通性。步骤如下:
使用快捷键 Window + R,进入运行界面。
在 打开 中输入 cmd ,单击 确定 。
在命令窗口输入 ping XXX.XXX.XX.XX ,单击 Enter 运行命令。
提示
XXX.XXX.XX.XX 为实际设置的相机或机器人 IP 地址。
查看命令返回值,判断与该 IP 地址的通信是否正常。
通信正常时,显示如下信息。
正在 Ping XXX.XXX.XX.XX 具有 32 字节的数据:来自 XXX.XXX.XX.XX 的回复: 字节=32 时间<1ms TTL=128来自 XXX.XXX.XX.XX 的回复: 字节=32 时间<1ms TTL=128来自 XXX.XXX.XX.XX 的回复: 字节=32 时间<1ms TTL=128来自 XXX.XXX.XX.XX 的回复: 字节=32 时间<1ms TTL=128通信不正常时(可能由 IP 地址冲突导致),显示如下信息,此时需重新设置 IP 地址。
正在 Ping XXX.XXX.XX.XX 具有 32 字节的数据:来自 XXX.XXX.XX.XX 的回复: 无法访问目标主机。来自 XXX.XXX.XX.XX 的回复: 无法访问目标主机。来自 XXX.XXX.XX.XX 的回复: 无法访问目标主机。来自 XXX.XXX.XX.XX 的回复: 无法访问目标主机。