JAKA (节卡)¶
本节介绍如何主控 JAKA 机器人,包含以下3步:
检查控制器及软件版本¶
机器人控制器版本:1.5.12_28_x86
提示
如机器人控制器版本低于 1.5.12_28_x86,需升级 JAKA 机器人控制器。如高于 1.5.12_28_x86,需降至该版本。
JAKA Zu APP 版本:JAKA Zu APP 1.5 移动端版本、JAKA Zu APP 1.5 PC 版本
建立网络连接¶
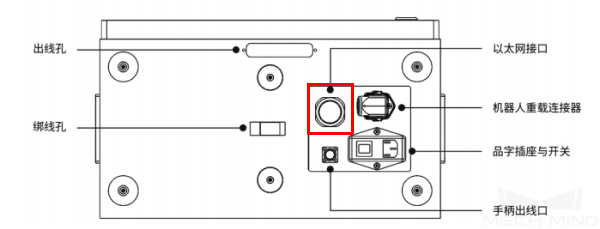
安装 JAKA Zu APP¶
下载并安装 JAKA Zu APP 1.5 移动端版本或 PC版本,如下图所示。节卡机器人免示教器,JAKA Zu APP 可与 Pad、手机、PC 端交互。
提示
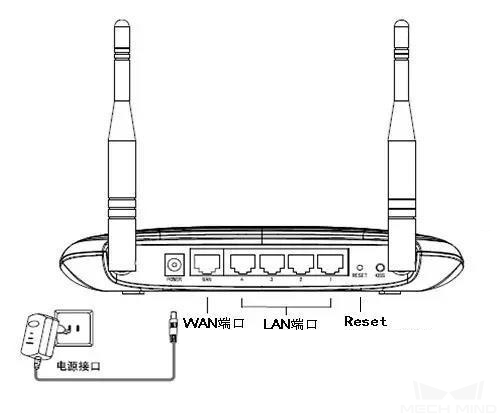
如多相机同时使用,且路由器无上网功能时,需保证 LAN 网口数量充足。
设置 IP¶
运行 JAKA Zu APP,点击主界面右上角的 未连接 进入 连接机器人 界面,单击
 可进入输入密码界面。
可进入输入密码界面。
输入管理员密码(默认密码为 jakazuadmin ),然后单击 连接机器人 。

出现如下界面,表示机器人连接成功。

单击 打开本体电源,然后单击 使能机器人 ,机器人成功上电。
注意
在机器人上电后,弹出提示信息窗口,请务必填写末端负载值,否则机器人启动后的一瞬间上下浮动较大,很容易造成危险。

单击主界面右上角的 设置
 ,依次单击 ,即可设置 IP 地址。JAKA Zu APP 需与 JAKA 机器人在同一网段。
,依次单击 ,即可设置 IP 地址。JAKA Zu APP 需与 JAKA 机器人在同一网段。
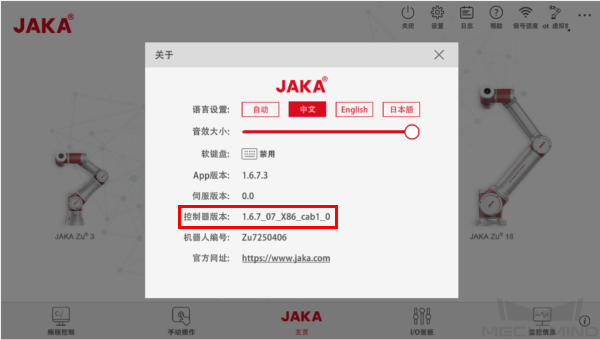
查看控制器版本¶
单击主界面右下角  查看控制器版本,如下图所示;需确保控制器版本为1.5.12_28_x86。
查看控制器版本,如下图所示;需确保控制器版本为1.5.12_28_x86。
提示
如控制器版本低于 1.5.12_28_x86,需升级控制器;如高于 1.5.12_28_x86,需降至该版本。
以上步骤完成后,可启动 Mech-Center,连接机器人。
测试机器人连接状态¶
在使用 Mech-Viz 控制机器人前,请注意以下事项:
Mech-Viz 工具栏中的速度不能超过 50%,否则机器人会非常容易出现不运动的错误。
务必设置示教器上的末端负载值,否则机器人运动幅度过大,启动瞬间不可控。
Mech-Viz 中移动类步骤的运动方式尽量使用直线运动。若选择关节运动,则机器人运动比较缓慢。
每个机器人的 DH 参数不同,因此用户需要从示教器上读取具体 DH 参数。 具体方法:在连接机器人后,点击 10 次左上角 logo 图标,填写密码(默认为 JAKAAMAZING),出现如下界面。
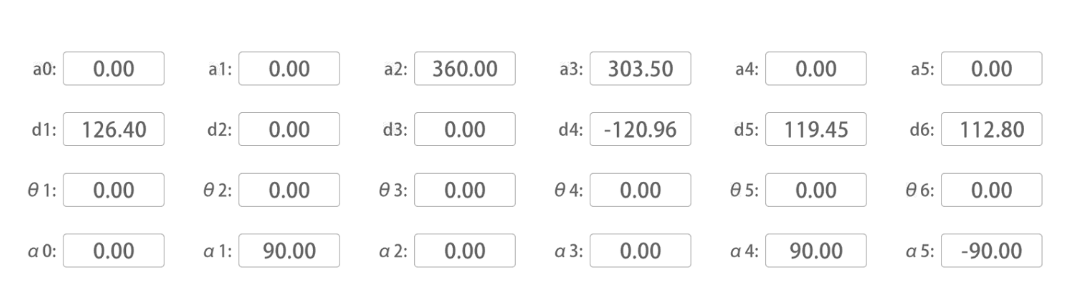
将上图中的 [d1, a2, a3, d4, d5, d6] 值填入
C:/Users/Administrator/AppData/Roaming/Mmind/robot/jaka/jaka_zu7/jaka_zu7_algo.json文件中 dh 字段值。由于无法调整 jaka_zu7_algo.json 文件中的 shoulder_offset 和 elbow_offset (肩部偏移和肘部偏移)值,所以机器人运动还是会存在一定误差。
请参阅:测试机器人连接状态 。