位姿变换¶
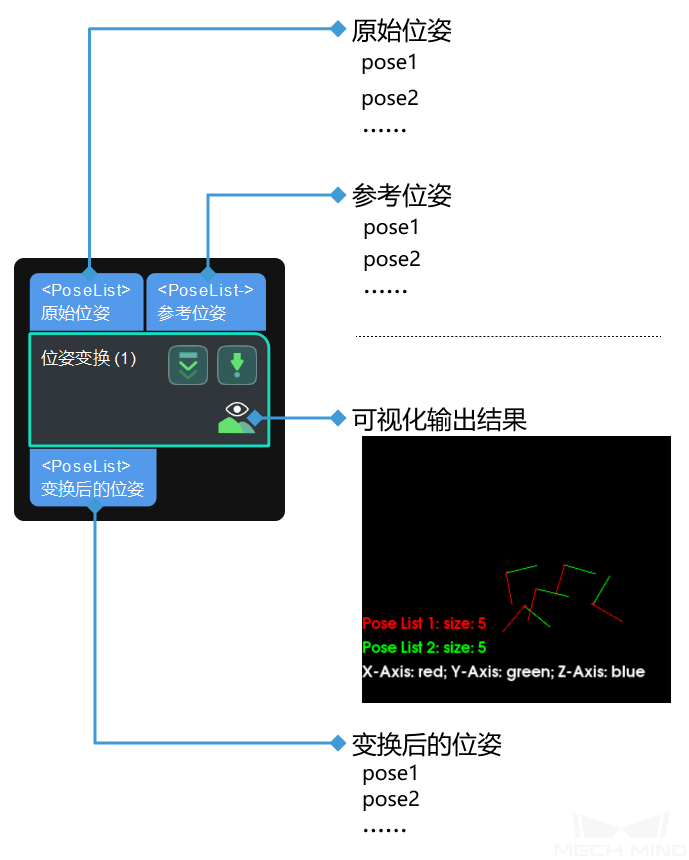
输入与输出¶
参数说明¶
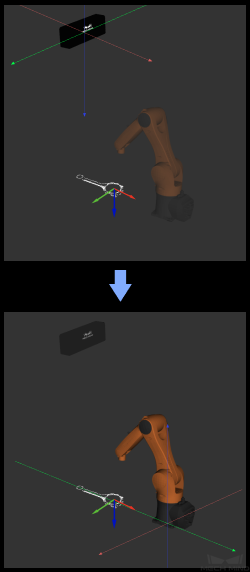
可视化设置
- 在选定坐标系下显示点云
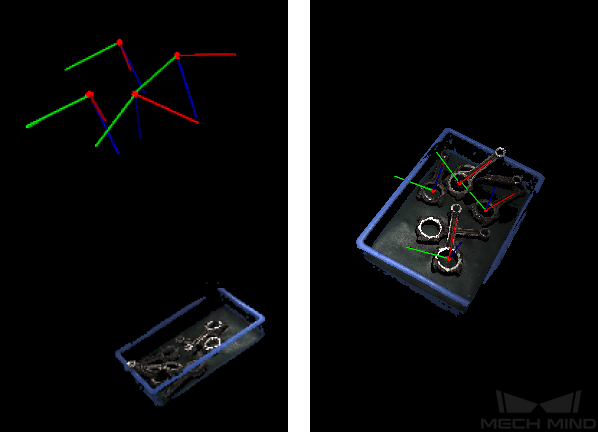
- 参数解释:在机器人坐标系或相机坐标系下显示点云。默认值:机器人坐标系。值列表:机器人坐标系、相机坐标系。调节说明:当选择 相机坐标系 时,调试输出窗口显示相机坐标系下的可视化输出结果;当选择 机器人坐标系 时,调试输出窗口显示机器人坐标系下的可视化输出结果。具体效果见 调节示例 。
小技巧
选择 机器人坐标系 时,调试输出窗口显示为黑色,需调整视角才可看到点云及坐标。
选择 相机坐标系 时,调试输出窗口仅显示点云,需调整点云方向才可看到坐标。
- 位姿显示设置
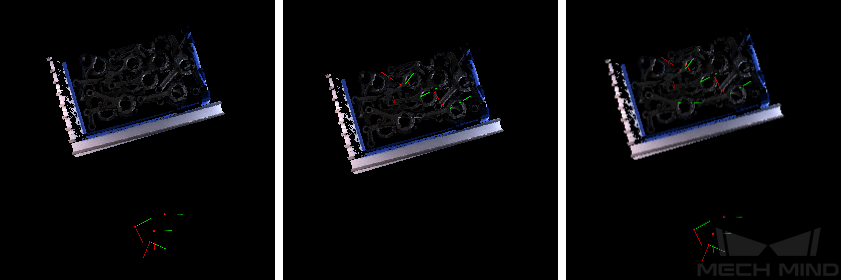
- 参数解释:该参数用于设置位姿的显示形式。默认值:只显示输出位姿。值列表:只显示输出位姿、只显示输入位姿、输入与输出一同显示。调节说明:根据实际需求,在下拉列表中选择合适的位姿显示设置。具体效果见 调节示例 。
变换设置
- 变换类型
- 参数解释:该参数用于设置位姿的变换类型。默认值:CameraToRobot值列表:CameraToRobot、RobotToCamera、AllWithFirst、FirstWithAll、UseCorrespondenceInput调节说明:
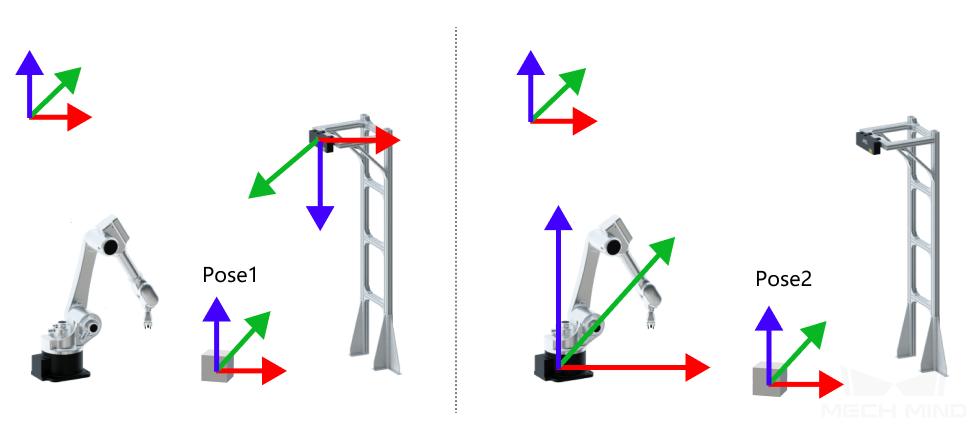
CameraToRobot:已知物体在相机坐标系中的位姿 Pose1,当变换类型设置为 CameraToRobot 时,即可输出物体在机器人坐标系中的位姿 Pose2。具体效果见 调节示例 。
RobotToCamera:已知物体在机器人坐标系中的位姿 Pose1,变换类型设置为 RobotToCamera 时,即可输出物体在相机坐标系中的位姿 Pose2。具体效果见 调节示例 。
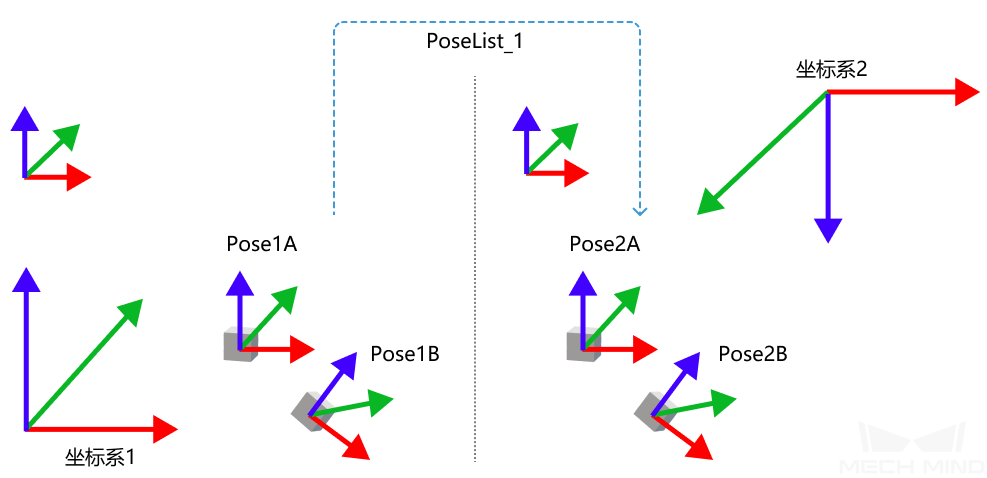
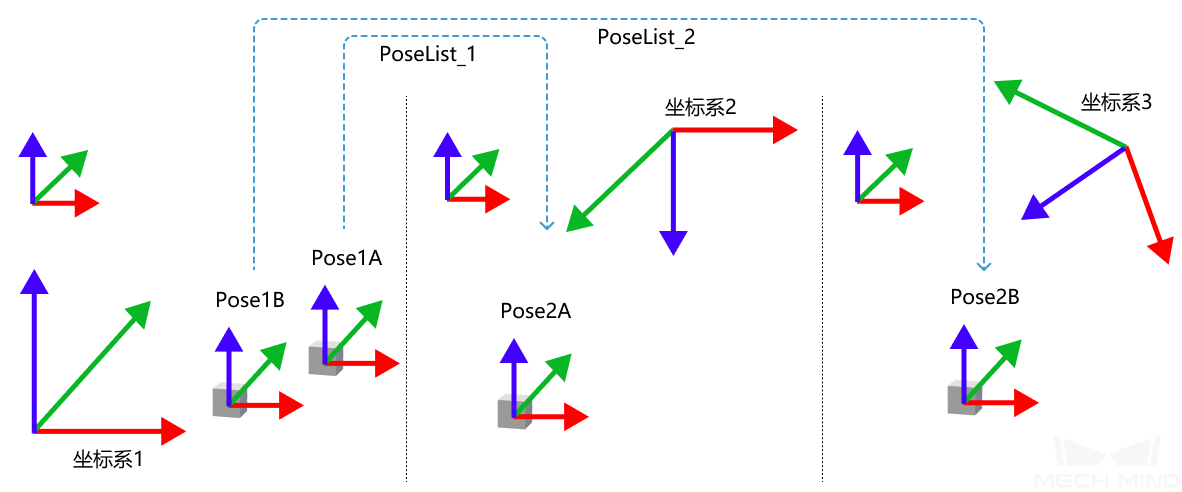
AllWithFirst:已知物体 A、B 在坐标系 1 中的位姿为 Pose1A、Pose1B,当变换类型设置为 AllWithFirst 时(需要输入参考位姿),即可输出物体 A、B 在坐标系 2 中的位姿 Pose2A、pose2B。在此转换过程中,对所有要转换的位姿使用第一个参考位姿进行转换。具体效果见 调节示例 。
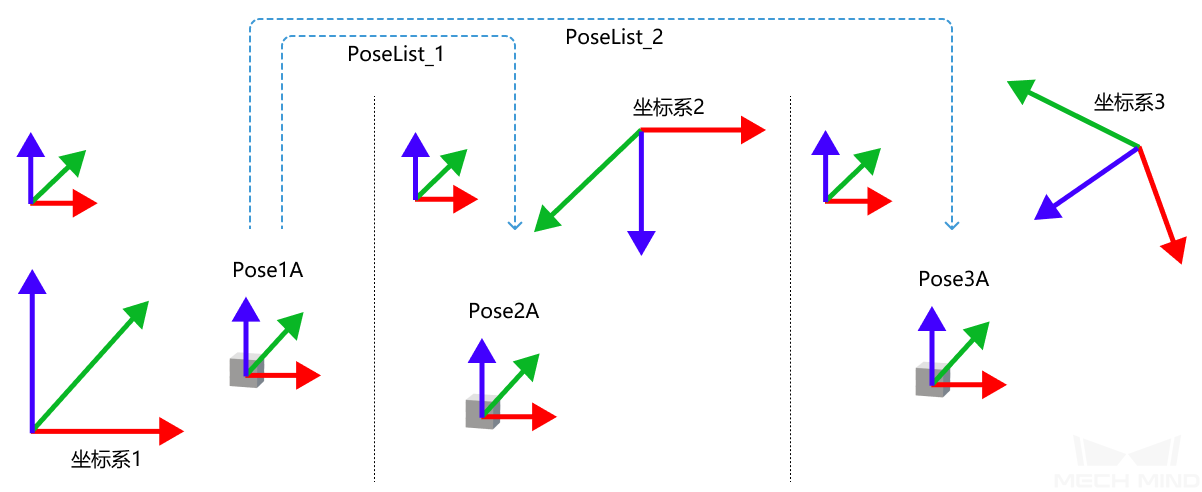
FirstWithAll:已知物体 A、B 在坐标系 1 中的位姿为 Pose1A、Pose1B,变换类型设置为 FirstWithAll 时(需要输入参考位姿),即可输出物体 A 在坐标系 2 和坐标系 3 中的位姿 Pose2A、Pose3A。在此转换过程中,对第一个要转换的位姿使用所有参考位姿进行转换。具体效果见 调节示例 。
UseCorrespondenceInput:已知物体 A、B 在坐标系 1 中的位姿为 Pose1A、Pose1B,变换类型设置为 UseCorrespondenceInput 时(需要输入参考位姿),即可输出物体 A 在坐标系 2 中的位姿 Pose2A 和物体 B 和坐标系 3 中的位姿 Pose3B。在此转换过程中,待转换位姿与参考位姿一对一转换。具体效果见 调节示例 。