开始
应用指南
软件使用指南
机器人通信配置指南
更多支持
附录
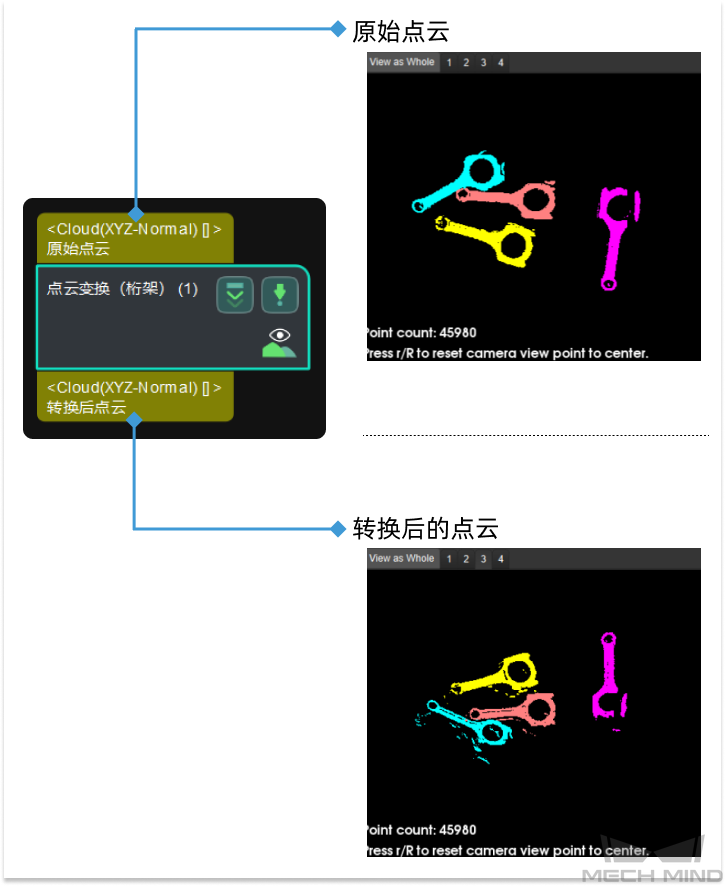
该步骤可将输入的点云变换至相机或桁架机器人坐标系,然后输出。
该步骤用于桁架机器人工程的点云坐标系变换。
注意
若工程中使用的是非桁架机器人,需选择使用 点云变换 步骤。
如果步骤选择错误,将导致转换后的点云位置有误,并且可能输出错误的抓取点。
CameraToRobot:将点云由相机坐标系转换到桁架机器人坐标系。具体效果见 调节示例 。
RobotToCamera:将点云由桁架机器人坐标系转换到相机坐标系。具体效果见 调节示例 。