开始
应用指南
软件使用指南
机器人通信配置指南
更多支持
附录
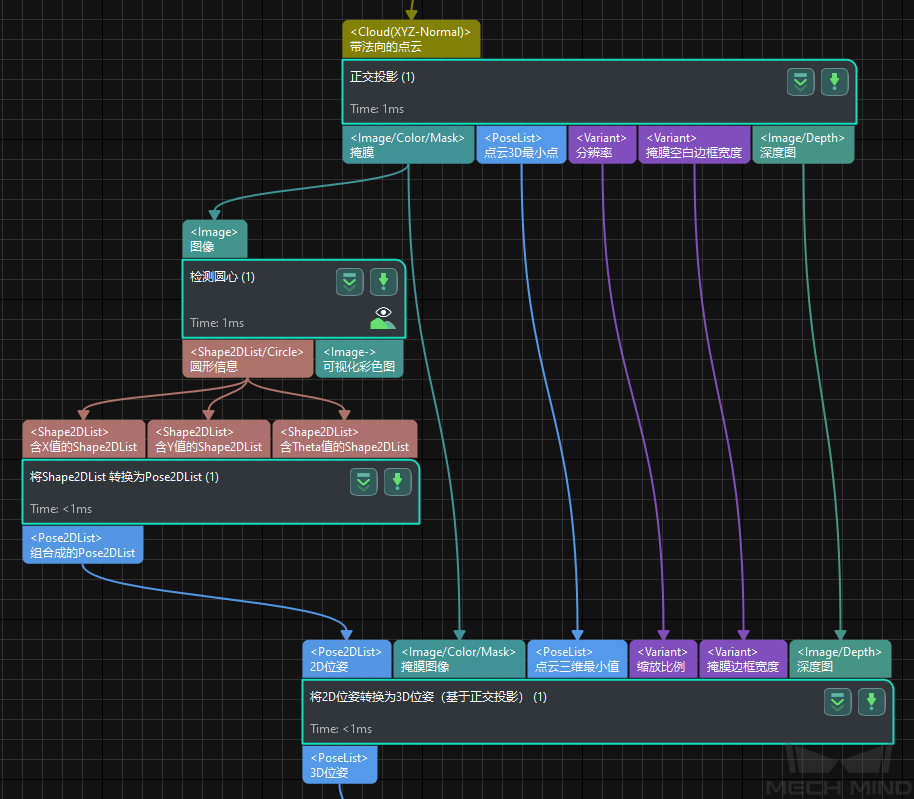
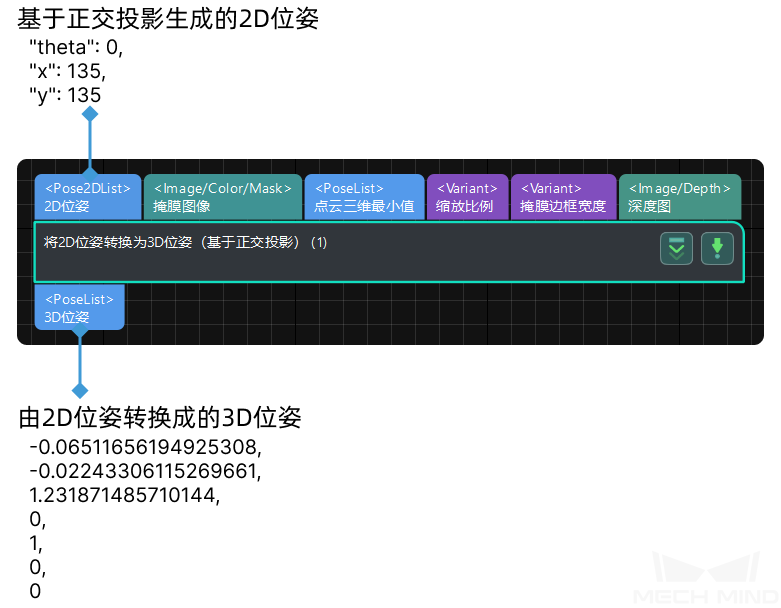
该步骤可将基于 正交投影 步骤生成的 2D 位姿转换为 3D 位姿。
该步骤一般用于量测场景,连接于 正交投影 步骤之后,将 正交投影 步骤输出的 2D 图像中的位姿转换为 3D 位姿。
以输出工件上某个圆的 3D 位姿为例,其步骤连接如下图所示。