连接硬件¶
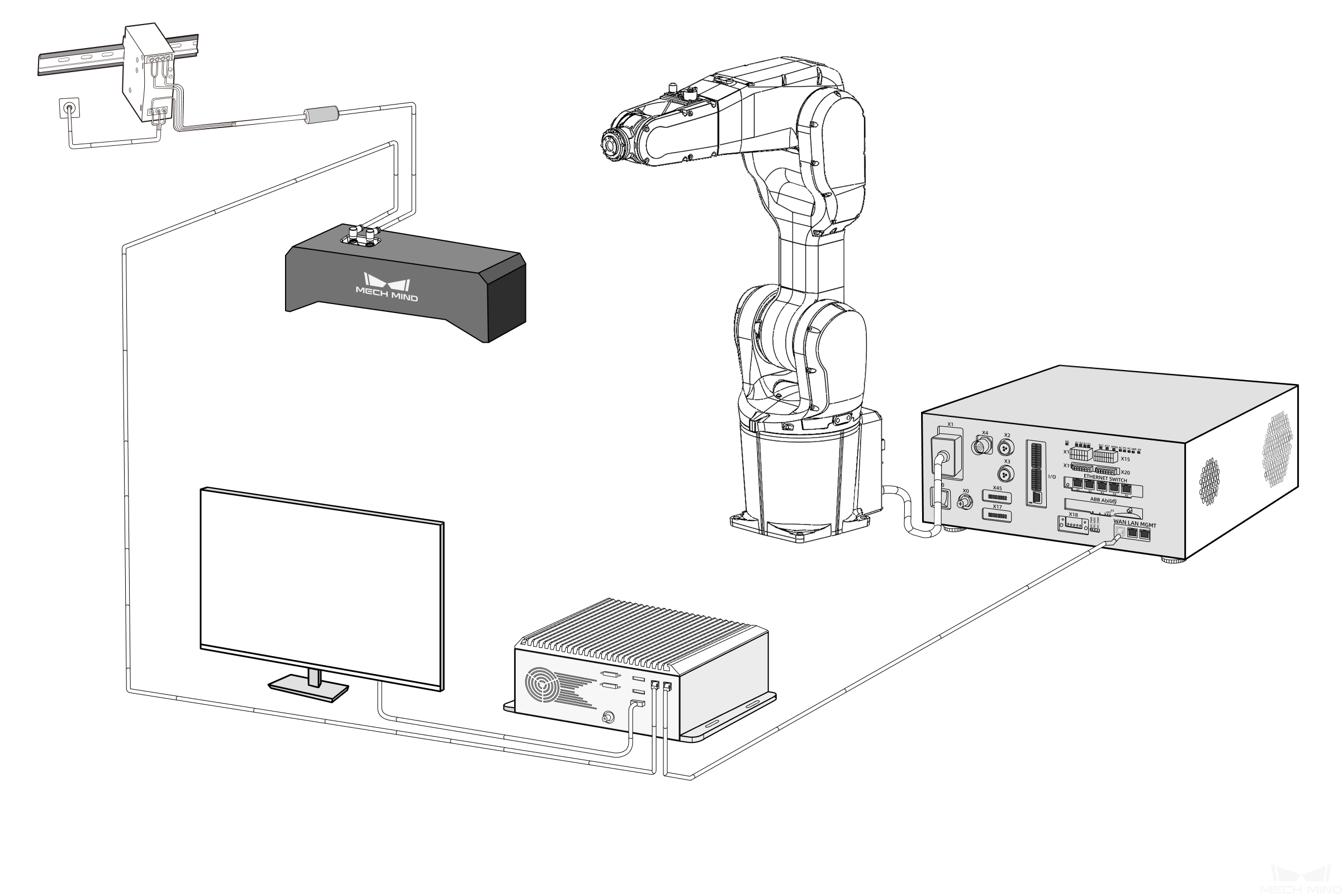
梅卡曼德视觉系统硬件连接主要包括:
相机连接:
使用网线连接相机与工控机;
使用导轨电源接通相机电源。
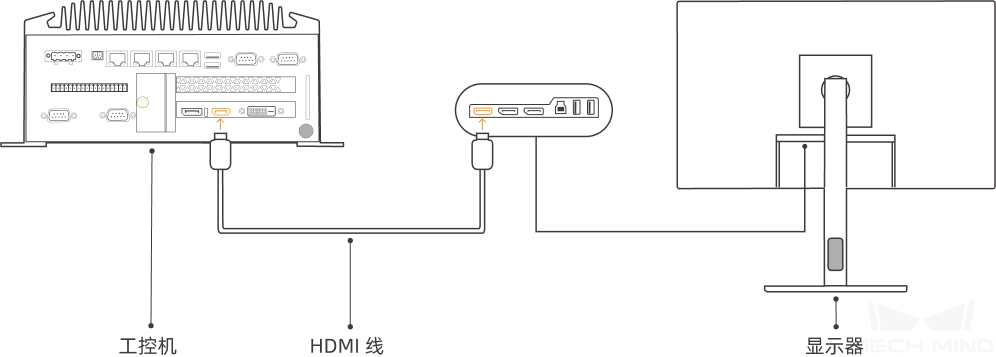
工控机连接:
使用网线连接工控机与相机;
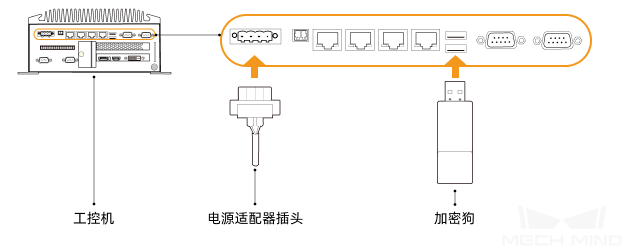
使用电源适配器接通工控机电源;
使用 HDMI 线连接工控机与显示器(自行准备显示器与 HDMI 线)。
机器人控制柜连接:
使用网线连接机器人控制柜与工控机(自行准备网线);
使用电源适配器接通机器人控制柜电源。
注意
连接时,请最后接通电源。
相机、工控机及机器人控制柜通过网线连接。网口不足时,可使用千兆交换机连接。
由于网线外观基本相同,建议连接前使用标签加以区分。
连接相机¶
注意
相机为 Eye in Hand 安装方式时,需要注意相机线缆的走线。机器人末端轴大范围运动时,若机器人管线包或相机线缆存在拉扯情况,在不影响机器人正常工作的情况下,可以通过软件限制机器人末端轴的运动范围。
相机连接包含两部分:
使用网线连接相机与工控机;
使用导轨电源接通相机电源。
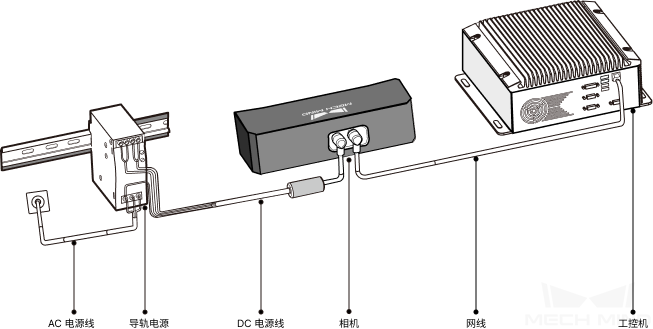

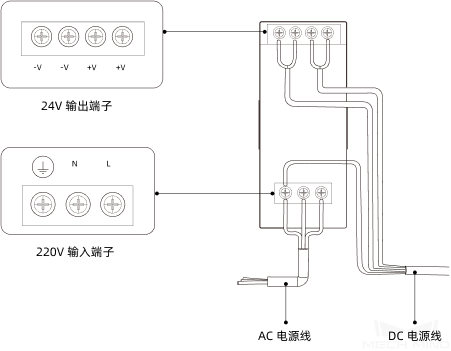
连接导轨电源¶
导轨电源接线连接时,插头需接入对应的输入/输出电压端子,如下图所示。
AC 电源线连接的三股接线插头(PE、N、L)分别插入对应的 220V 输入端子(
、N、L)中。
DC 电源线连接:
+V 接入 24V 输出端子的 +V 中;
-V 接入 24V 输出端子的 -V 中;
PE 接入 220V 输入端子
警告
导轨电源的接地端子必须接地!
导轨电源需放在配电箱中使用。导轨或连接导轨的配电箱应可靠接地。
如有多台导轨电源,安装时应保持一定间距。