位置姿勢を四元数と並進ベクトルに分解¶
注釈
このステップの内容は現在メンテナンス中です。本ステップについての情報が必要な場合は、Mech-Mind株式会社(メールアドレス:docs@mech-mind.net)までお問い合わせください。
機能¶
位置姿勢を、四元数と並進ベクトルに分解します。
使用シーン¶
汎用の位置姿勢分解ステップです。その後の 「回転ベクトル」 と 「位置姿勢中心」 のデータタイプを必要とするステップにデータソースを提供します。
入力と出力¶
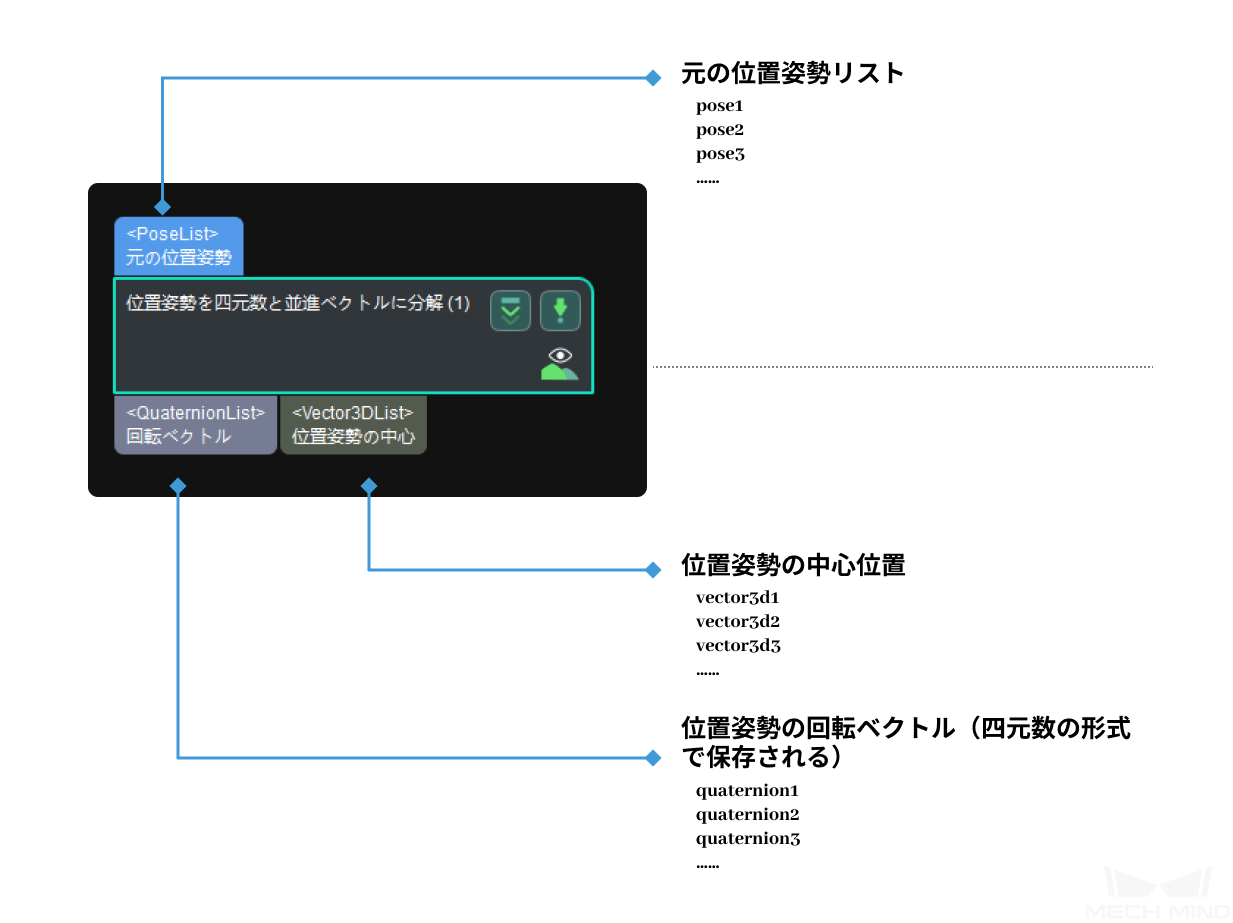
注釈
このステップの内容は現在メンテナンス中です。本ステップについての情報が必要な場合は、Mech-Mind株式会社(メールアドレス:docs@mech-mind.net)までお問い合わせください。
位置姿勢を、四元数と並進ベクトルに分解します。
汎用の位置姿勢分解ステップです。その後の 「回転ベクトル」 と 「位置姿勢中心」 のデータタイプを必要とするステップにデータソースを提供します。