3D位置姿勢高精度推定(簡易版)¶
機能¶
ステップ 3D位置姿勢高精度推定 の使いやすいバージョンで、より直感的にパラメータを調整することができます。
このステップにより、点群モデルとシーンの点群を正確にマッチングさせ、対象物の位置姿勢を出力することができます。
使用シーン¶
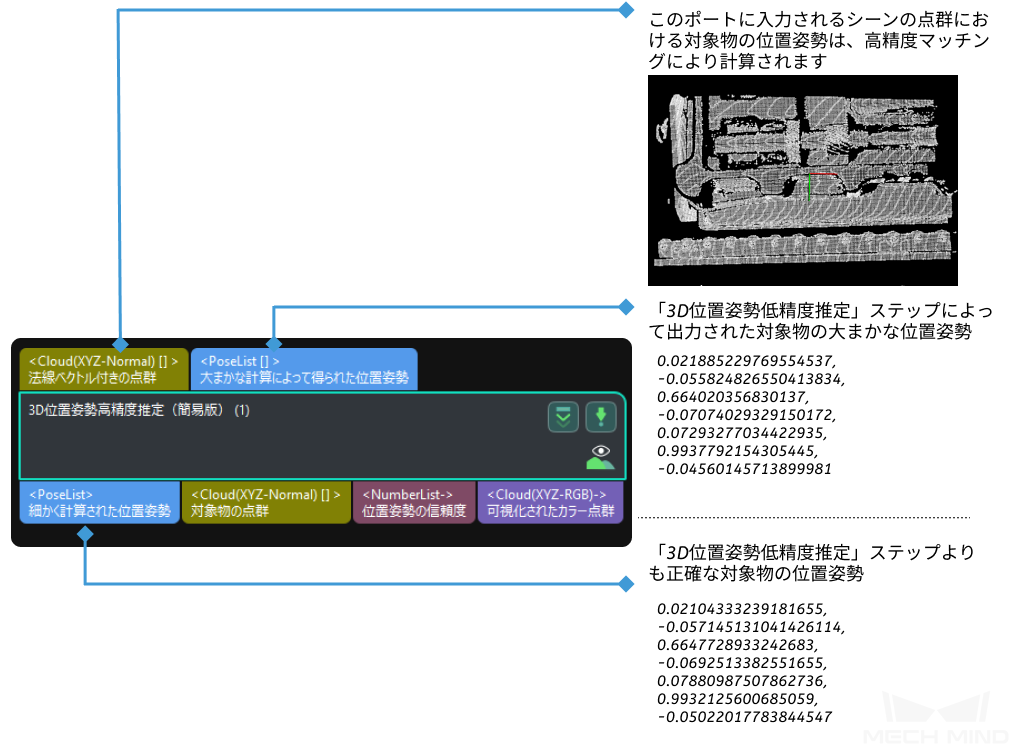
3D位置姿勢低精度推定 または 3D位置姿勢低精度推定(V2) ステップで出力された大まかな候補位置姿勢に基づいて、より正確なマッチングを行い、より正確な対象物の位置姿勢を出力するために使用されます。
入力と出力¶
パラメータ説明¶
パラメータのデバッグレベル
基本設定¶
モデル設定
- モデル選択
- パラメータ説明:このパラメータは、作成された点群モデルファイルを選択するために使用されます。調整説明:ステップパラメータで
 をクリックし、ドロップダウンバーから作成された点群モデルファイルを選択します。点群モデルの作成については、 マッチングモデル・把持位置姿勢エディタ をご参照ください。
をクリックし、ドロップダウンバーから作成された点群モデルファイルを選択します。点群モデルの作成については、 マッチングモデル・把持位置姿勢エディタ をご参照ください。
マッチング方法
- マッチングモード
- パラメータ説明:このパラメータは、エッジマッチングとサーフェスマッチングのどちらを使用するかを選択するために使用されます。オプション:サーフェスマッチング、エッジマッチング。
サーフェスマッチング:対象物表面の点群モデルを使用して点群モデルのマッチングを行います。
エッジマッチング:対象物エッジの点群モデルを使用して点群モデルのマッチングを行います。
初期値:サーフェスマッチング。調整アドバイス:対象物の表面に明らかな認識可能な特徴がある場合(クランクシャフト、ローター、鉄筋など)、サーフェスマッチングを推奨しています。対象物の表面の特徴を反映した点群モデルを作成する必要があります。対象物が平らで、カメラの下に明確な固定エッジの特徴がある場合(パネル、トラックリンク、コネクティングロッド、ブレーキディスクなど)、エッジマッチングを推奨しています。対象物のエッジ特徴を反映した点群モデルを作成する必要があります。注意
マッチングモードは、 モデル選択 パラメータで指定されたモデルタイプ(サーフェスモデルまたはエッジモデル)と一致する必要があります。例えば、マッチングモードがサーフェスマッチングの場合、 モデル選択 パラメータでサーフェスモデルを設定する必要があります。
- 偏差補正能力
- パラメータ説明:このパラメータは、 3D位置姿勢低精度推定 または 3D位置姿勢低精度推定(V2) によって出力された結果の偏差を補正するために使用されます。この能力が高ければ高いほど、位置姿勢高精度推定において、大まかな位置姿勢を正確な位置姿勢に補正することができます。 偏差補能力 を大きくしすぎると、マッチング精度が低下することがありますので、適切に調整する必要があります。オプション:高レベル、中レベル、低レベル。初期値:低レベル(ほとんどの場合に適用可能)。調整アドバイス:マッチング結果に大きな偏差がある場合は、まずパラメータ 偏差補正能力 を確認してください。マッチング偏差が大きすぎて、補正能力の範囲を超えている場合は、 3D位置姿勢低精度推定 または 3D位置姿勢低精度推定(V2) のステップパラメータを調整することをお勧めします。
- 実行モード
- パラメータ説明:このパラメータは、マッチングの実行モードを選択するために使用されます。このパラメータは、マッチング精度とマッチング速度の関係を表しています。精度が高いほど、時間がかかります。オプション:高速、標準、高精度、超高精度。初期値:標準。調整アドバイス:実際のニーズに応じて選択してください。
結果検証設定
- 信頼度しきい値
- パラメータ説明:このパラメータは、マッチング結果が有効であるかどうかを判定するために使用されます。マッチング結果の検証スコアがこのしきい値よりも大きい場合、結果は有効であると見なされます。この値が高いほど、結果はより正確になる傾向があります。初期値:0.000
- モデルの可視表面のみを考慮
- パラメータ説明:このパラメータは、マッチングにおいてモデルの可視部分のみを考慮するかどうかを選択するために使用されます。マッチングモードを サーフェスマッチング に設定する場合、このパラメータを設定する必要があります。チェックを入れると、モデルの可視部分のみを考慮してマッチングを行うため、計算が容易になり、マッチングの信頼度が高くなります。初期値:チェックを入れない。調整説明:同じ視点にカメラの見えない部分がある対象物のモデル(完全な円柱の対象物モデルなど)には、このオプションにチェックを入れることをお勧めします。同じ視点から完全に見える対象物のモデル(ブレーキディスク表サーフェスマッチングモデルなど)の場合、このオプションにチェックを入れる必要はありません。
出力設定
- 単一点群の出力結果の数
- パラメータ説明:1つの点群に対して出力される結果数の上限値です。初期値:1調整説明:1つの点群に対して複数のマッチング結果があった場合、スコアの降順にソートされ、上限値に従ってスコアの高い結果が出力されます。
詳細設定¶
詳細については、ステップ 3D位置姿勢高精度推定 をご参照ください。