3D ROI内の点群を抽出¶
使用シーン¶
このステップを使用して対象物の点群に焦点を絞り、背景点群と干渉点群を無視します。
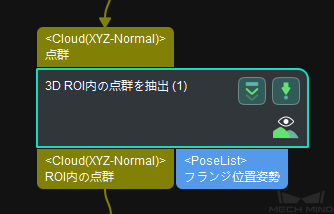
入力と出力¶
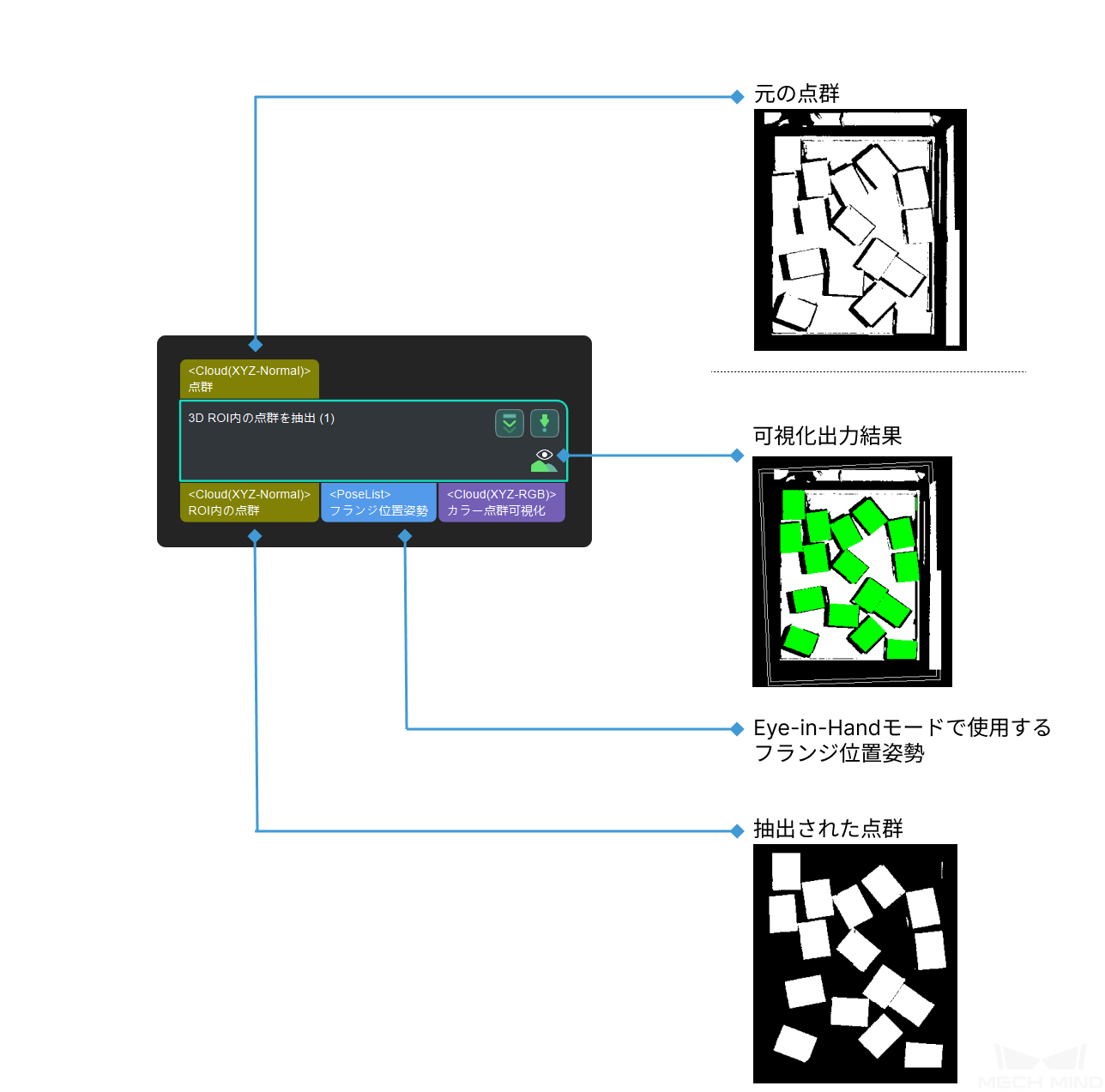
パラメータの説明¶
パラメータ調整説明¶
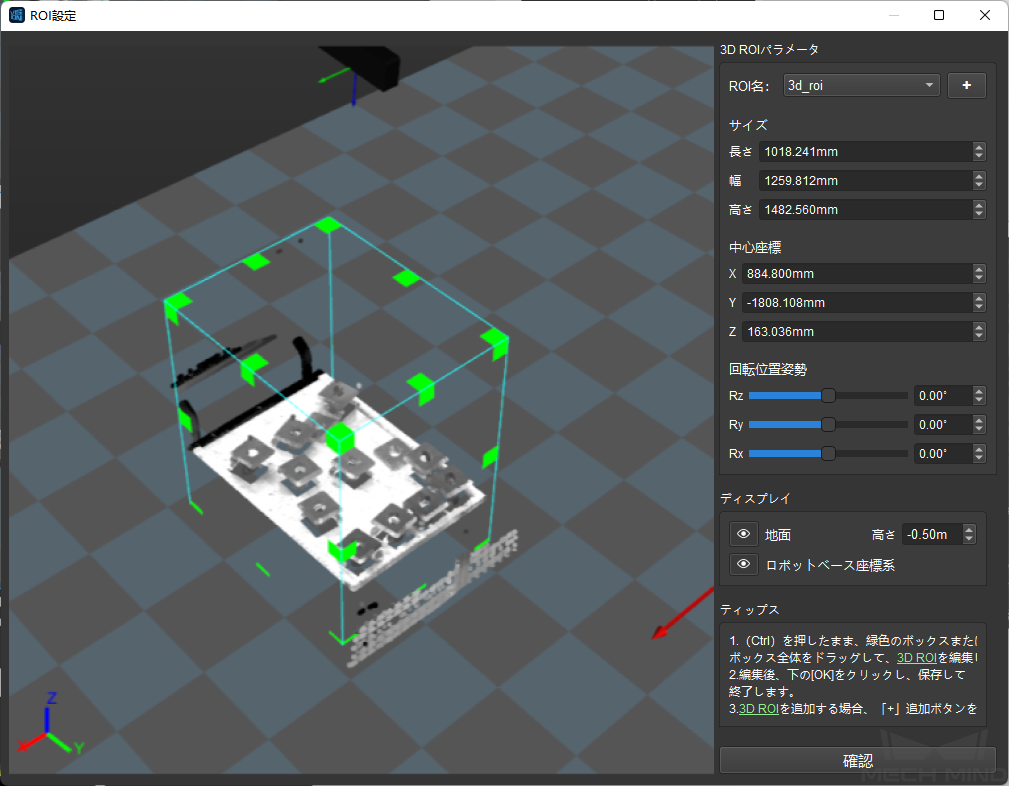
3D ROI設定
- 3D ROIファイル
- 調整説明:下図に示すように、 3D ROIを設定 をクリックしてその画面に入ります。詳細については、 3D ROIの設定手順 をご参照ください。
入力点群の座標系タイプ
初期値:カメラ座標系オプション:カメラ座標系、ロボット座標系調整説明:入力点群の座標系を変更します。下図に示すように、①はカメラ座標系での入力点群で、②はロボット座標系での入力点群です。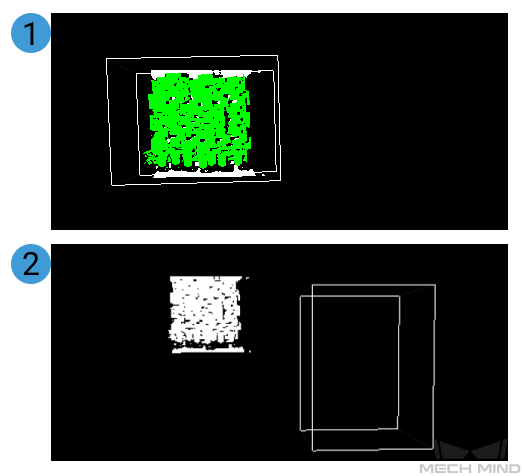
空の状態の設定
- 3D ROI内の最小点数
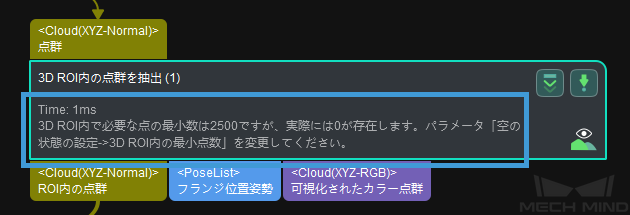
- 初期値:0調整説明:このパラメータは3D ROIに3D点を抽出する数の最小値を設定するために使用されます。3D ROIで抽出した3D点の数はこの値より小さければ、設定した3D ROI内の点の数は最小値の要求を満たさないことになりますので、点群を送信しません。
- 3D ROI内の点が空の状態であるかを送信
- 初期値:チェックを入れる調整説明:チェックを入れれば、3D ROI内の点が空の状態であるかを送信します。初期値にしたら、3D ROI内の点の数は「3D ROI内の最小点数」に設定した値より少ない場合、下図のようなメッセージが出てきます。
 下図に示すように、チェックを入れなければ、メッセージは表示されません。
下図に示すように、チェックを入れなければ、メッセージは表示されません。