概要¶
本節では、Mech-Interfaceの2種類の通信メカニズム、違い、および使用シーンについて説明していきます。
通信メカニズム¶
Mech-Interfaceの2種類の通信メカニズムは下図に示します。
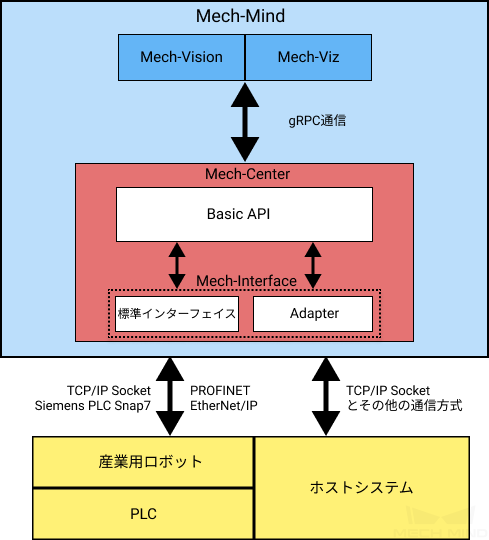
Adapterは、外部通信デバイス(産業用ロボット、上位システムおよびPLC)とMech-VisionおよびMech-Vizソフトウェアを接続するPythonアダプタープログラムです。Mech-VisionおよびMech-Vizと内部的に通信し、Pythonが実装できる任意の通信プロトコルを介して外部デバイスと通信します。
標準インターフェースは、Mech-Mindが提供する完全なAdapterプログラムです。これは、様々な通信プロトコルに対応し、強力な制御コマンドセットと異常警報システムを備えており、ほとんどのニーズを満たすことができます。
標準インターフェースとAdapterの違い¶
Adapterと標準インターフェースはどちらも、外部デバイスをMech-VisionおよびMech-Vizソフトウェアと接続するためのアダプタープログラムです。標準インターフェースはMech-Mindが提供する固定なアダプタープログラムであり、カスタマイズ開発に対応していません。
内部でBasic APIを呼び出してMech-VisionおよびMech-Vizと通信し、外部で特定の通信プロトコルを介して外部デバイスと通信します。
標準インターフェースとAdapterの主な違いは次の表に示します。
違い |
標準インターフェース |
Adapter |
内部通信 |
両方とも、Basic APIの呼び出しによってMech-VisionおよびMech-Vizと通信します。 |
|
外部通信プロトコル |
標準インターフェースでは、次の通信プロトコルを使用した外部デバイスとの通信のみをサポートします: - TCP/IP Socket - Siemens PLC Snap7 - PROFINET - EtherNet/IP - 三菱MC - Modbus TCP |
Pythonが実装できる任意の通信プロトコルを介して外部デバイスと通信できます。 |
機能 |
視覚結果の出力のみに対応します。 |
視覚に関する機能だけでなく、ユーザーインターフェイス、データベース、注文システムなどのPythonがサポートする機能も提供します。 |
デプロイメントの柔軟性 |
簡単で使いやすいであるため、迅速にデプロイできます。 |
手動作成が必要であり、時間と人件費が高いです。 |
拡張可能性 |
機能拡張はサポートされていません。 |
より多くの通信プロトコルと機能をサポートするように拡張できます。 |
使用シーン¶
実際の使用シーンでは、通常、外部通信デバイス、使用する通信プロトコル、およびプロジェクトで必要な通信機能に応じて、どの種類の Mech-Interfaceを使用するかを決定する必要があります。
標準インターフェースとAdapterがサポートする一般的な通信デバイスと通信プロトコルを次の表に示します。
通信先 |
通信プロトコル |
Mech-Interfaceの種類 |
説明 |
ロボット |
TCP/IP Socket |
標準インターフェース |
Mech-InterfaceはTCP/IP Socketのサーバーとして機能します。 |
UDP |
Mech-InterfaceはUDPのサーバーとして機能します。 |
||
PROFINET |
Mech-InterfaceはPROFINETのスレーブとして機能します。 |
||
EtherNet/IP |
Mech-InterfaceはEtherNet/IPのスレーブとして機能します。 |
||
Modbus TCP |
Mech-InterfaceはModbus TCPのスレーブとして機能します。 |
||
上位システム |
HTTP |
Adapter |
統合プロジェクトに適しており、Vizティーチング通信を採用しています。 |
WebSocket |
|||
TCP/IP Socket |
標準インターフェース |
Mech-InterfaceはTCP/IP Socketのサーバーとして機能します。 |
|
PLC |
TCP/IP Socket |
標準インターフェース |
Mech-InterfaceはTCP/IP Socketのサーバーとして機能します。 |
Siemens PLC Snap7 |
Mech-InterfaceはSiemens PLC Snap7のクライアントとして機能します。 |
||
PROFINET |
Mech-InterfaceはPROFINETのスレーブとして機能します。 |
||
EtherNet/IP |
Mech-InterfaceはEtherNet/IPのスレーブとして機能します。 |
||
Modbus TCP |
Mech-InterfaceはModbus TCPのスレーブとして機能します。 |
||
三菱MC |
Mech-InterfaceはMCのクライアントとして機能します。 |
ヒント
Mech-Interfaceを使用して外部デバイスと通信する必要がある場合、標準インターフェースがプロジェクトの要件を満たすことができる場合は、標準インターフェースを使用することをお勧めします。標準インターフェイスがプロジェクトの要件を満たしていない場合(たとえば、外部デバイスが標準インターフェースでサポートされていない通信プロトコルを使用し、プロジェクトが標準インターフェースでサポートされていない機能を使用する必要がある場合)、Adapterが必要です。
標準インターフェースがサポートする機能一覧については、 標準インターフェース開発者向けマニュアル をご参照ください。
Adapterがサポートする機能一覧については、 Adapterの機能 をご参照ください。
標準インターフェースとAdapterの詳細については、以下の内容をお読みください。