캐스케이딩 모듈 사용 사례 - 소형 작업물 분할을 위한 고정확도 모델 훈련
이 섹션에서는 3D 비전 가이드 크랭크 축 로딩 케이스를 통해, 시야가 넓고 부품 크기가 작은 상황에서 캐스케이딩 모듈을 활용한 고정밀 모델의 훈련 방법을 소개합니다.
훈련 프로세스
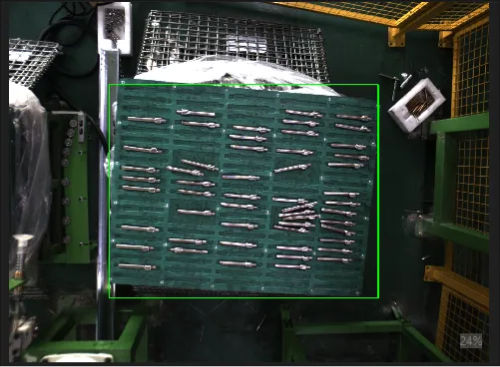
크랭크 축 자동 로딩 공정에서는 트레이에 무작위로 적재된 크랭크축을 비전 시스템이 정확히 인식하고, 로봇이 이를 정밀하게 피킹할 수 있도록 가이던스를 제공해야 합니다. 이때 캐스케이딩 모듈을 활용하면 아래의 세 가지 핵심 프로세스를 효과적으로 구현할 수 있습니다.
-
물체 검출 모듈을 사용하여 트레이의 위치를 포지셔닝합니다.
-
인스턴스 세그먼테이션 모듈을 사용하여 트레이에 배치된 크랭크 축을 분할합니다.
-
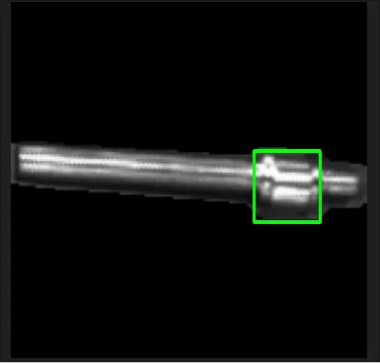
물체 검출 모듈을 사용하여 피킹을 위한 크랭크 축의 끝부분(머리 부분)을 포징셔닝합니다.
모델의 정확도를 높이기 위해서는 인식된 물체를 기준으로 데이터 수집 및 정밀한 레이블링이 필수적입니다.
데이터 획득
카메라 2D 파라미터 조정
-
고해상도 : 고해상도 카메라를 사용하는 것이 좋습니다. 이 프로젝트에서 LSR L-V4 카메라는 12MP의 고해상도 모드를 사용합니다.
-
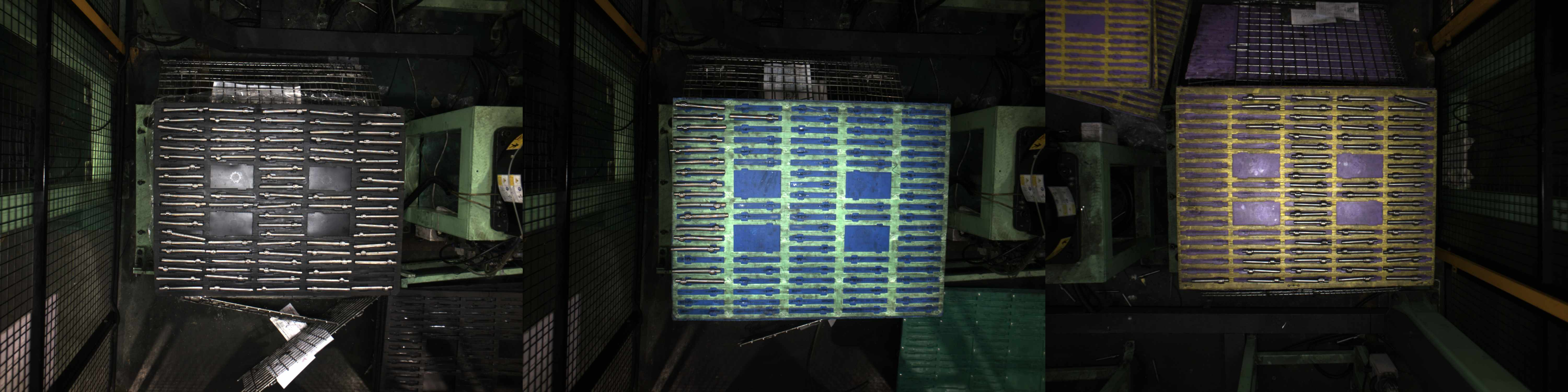
노출 모드 :주변 조명 변화와 트레이 색상의 다양성을 고려하여, 자동 노출 모드를 사용하고 자동 노출 ROI를 트레이를 포함하도록 조정하는 것이 권장됩니다.
-
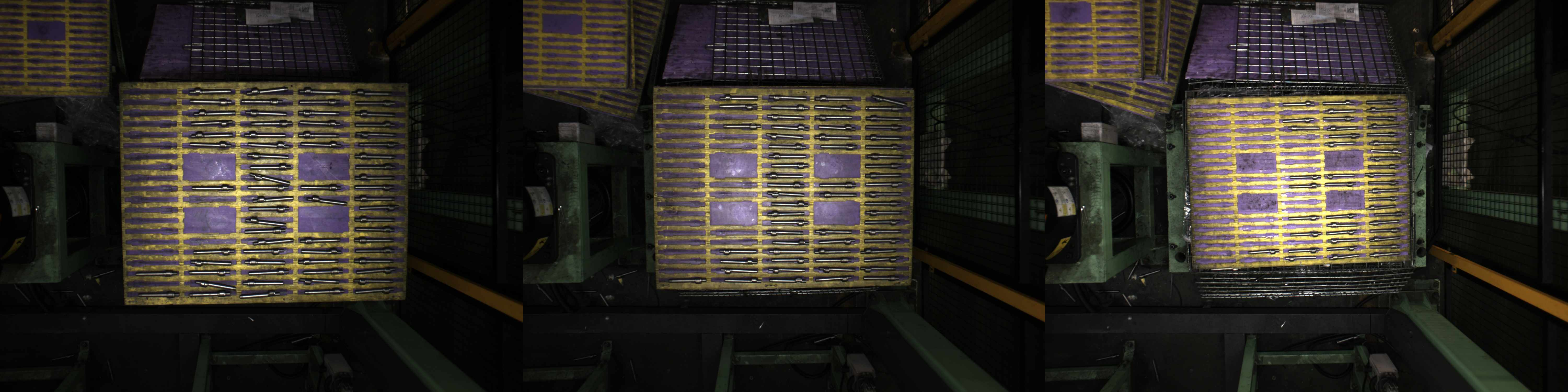
그레이스케일 값 : 고반사 재질인 크랭크 축은 배경에 따라 과다 노출이 발생할 수 있으므로, 적절한 그레이스케일 파라미터 값을 조정하는 것이 좋습니다.
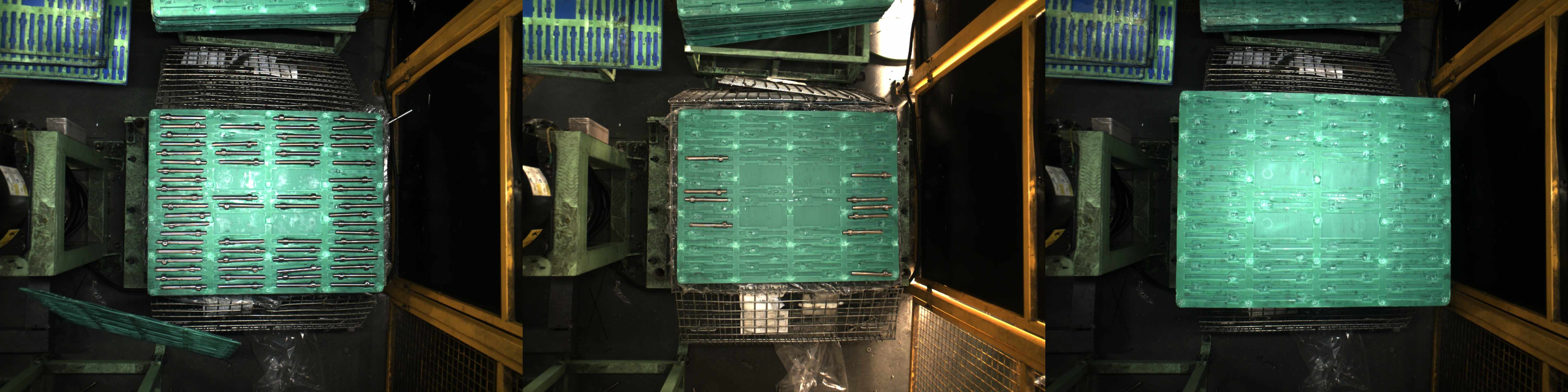
데이터 수집
수집한 데이터는 실제 작업 환경을 충분히 반영하고, 다양한 상황을 대표할 수 있어야 합니다. 다음 항목들을 고려하여 데이터를 수집하는 것이 중요합니다.
-
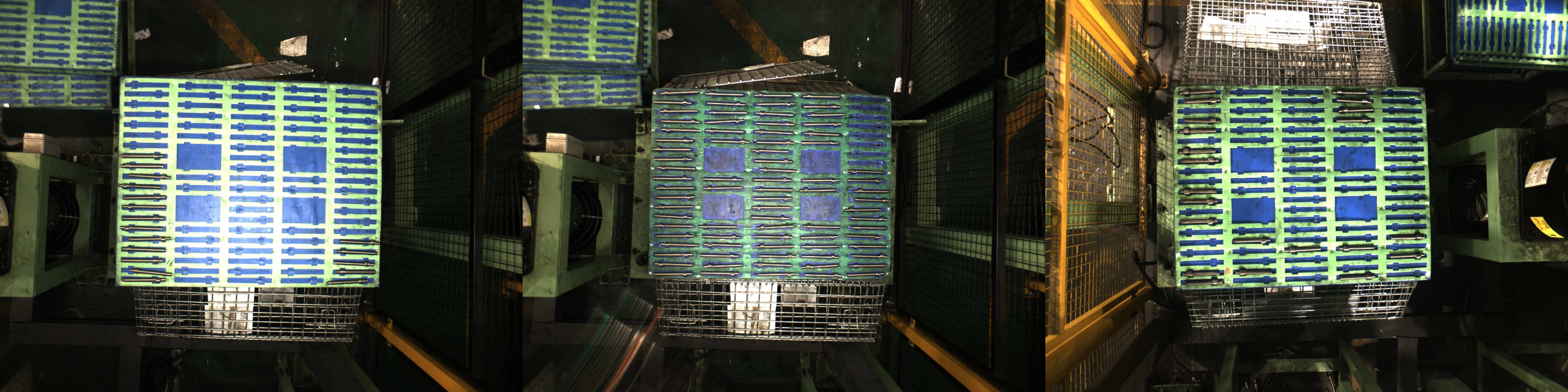
레이어 높이 : 최상단, 중간, 최하단 등 다양한 레이어 높이에서 이미지를 수집합니다.
-
트레이 색상 : 트레이의 색상별로 이미지를 수집합니다.
-
조명 조건 : 아침, 저녁 등 조도 변화가 있는 다양한 환경에서 이미지를 수집하며, 특히 물체가 반사되는 상황을 포함해야 합니다.
-
크랭크 축 개수 : 트레이에 가득 찬 상태부터 거의 비어 있는 상태까지 다양한 수량 조건을 포함해 데이터를 수집합니다. 특히, 20개 미만의 크랭크 축이 담긴 트레이에 중점을 둡니다.